微创机器人从手结构的设计及运动学分析

此机构的微型减速电机安置在滑块上,安装时要保证输出轴线过圆弧轨道的圆心,其结构简单,驱动方便。所以在实现绕r轴的转动中选用这种机构。
v轴移动结构的设计
可以实现直线运动的机构主要有:螺旋机构、曲柄滑块机构、有特定尺寸的四杆机构、链传动和齿轮-齿条机构等几种机构。
v轴移动要求手术器械做往复直线运动,结合各种机构运动特点,最后选用齿轮-齿条机构。
齿条的一端用微型圆锥滚动轴承连接在手术器械上,一端卡在套筒上,此机构手术器械便于拆装。
v轴转动和z轴摆动结构的设计
手术器械自身的回转机构设计:为了减轻手术器械自身的质量,以及体积限制,尽量选用结构比较简单的结构,并尽可能紧凑。v轴转动选用微型减速电机直接带动手术器械实现。微型减速电机安置在套筒上,再把套筒与齿条固连,如图5所示。
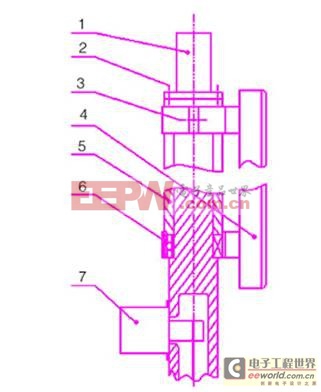
1—微型减速电机; 2、3—8xm1;4—齿条;
5—套筒;6—678zz轴承; 7—微型减速电机。
图5 v轴转动和z轴摆动
z轴摆动机构的设计:为了减少进入人体内手术器械的直径,把腕部的摆动控制系统设置在切口外部,这样使控制部分与腕部有一定的距离,可以采用丝传动来实现z轴摆动。不仅可以增加从手的精度和刚度,还能使从手结构紧凑、自重轻、刚度高。
为了防止机构运动时引起末端工具的开合及其姿态的变化,丝传动原理如图6所示。
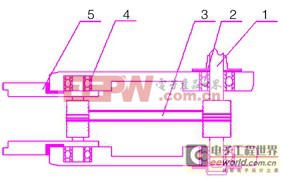
1—轴驱动轴;2、4—深沟球轴承;
3—钢丝;5—末端工具。
图6 走丝方法
运动学分析
运动学正解
按照d-h法严格建立杆件坐标系及各关节的参数,分别如图7和如表1所示。
表1 微创缝合机器人的d-h参数

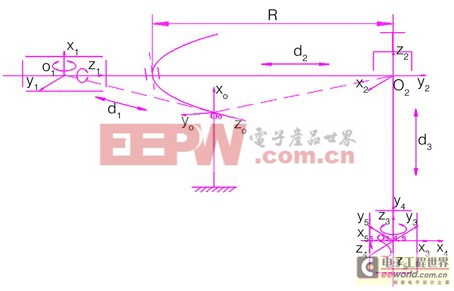
图7 微创缝合机器人结构
然后根据各关节参数以及通过matlab进行矩阵计算,可求得各杆系的转换矩阵以及机器人末端在基础坐标系中的位姿矩阵,如公式1-6所示。

评论