微创机器人从手结构的设计及运动学分析

近20年来,在微创外科及其市场需求的驱动下,将先进机器人技术、计算机技术、控制技术、远程通讯技术、图形图像技术等有机结合起来的计算机辅助机器人微创手术系统得到了迅速的发展。与人类相比,机器人具有状态稳定、定位准确、灵巧性好、工作范围大、不怕辐射和病菌感染等优势[1]。这将给2l世纪外科手术领域带来一场新的技术革命。
微创外科手术是指外科医生在病人身体上开四个孔(1cm),一个用于插入内窥镜,另两个用于插入细长的手术工具[2],剩下的一个孔用于辅助操作。该技术可以实现手术的最少损伤、减少手术并发症、缩短手术后康复时间,降低医疗费用。因此,受到医生和患者的普遍欢迎,是外科手术发展的必然趋势,具有广阔的应用前景。
由于受到工作空间的限制,微创手术难度大,时间长。现有微创手术机器人系统都是基于传统“缠绕打结法[3,4]”进行缝合打结的。由于存在线圈从工具端部滑脱,张紧力不容易控制等问题,导致缝合线打结一次成功率低,手术时间长,缝合打结效果差。为了解决传统“缠绕打结法”不适合机器人缝合打结的问题,本文提出一种新型的适合机器人缝合打结的“扭转打结法”,基于该方法设计出新型的微创手术机器人系统。
扭转打结法
“扭转打结法”[5]既是通过夹持工具的旋转使缝合线产生扭转,同时扭转可以转化为绞拧,形成打结所需的圆环的打结方法。
用“扭转打结法”进行缝合打结的一般步骤如图1所示。

图1 “扭转打结”法打结过程
从图1中可以看出,采用“扭转打结法”在打结过程中,在缝合线两端夹持点相互靠近时,缝合线由“扭转”转化为“绞拧”;而当两夹持点相互远离时,缝合线由“绞拧”转化为“扭转”。通过末端工具电机旋转便能完成这个动作要求,且左右工具之间没有相对的位置与姿态的变化,因此不受工作空间大小的影响,也不会因缝合线的张紧力而损伤血管。
机器人系统机构设计
“扭转打结法”通过对缝合线施加端部扭矩实现缝合线形状的改变,形成打结所需的线圈,其运动形式包括沿轴向的往复运动、绕轴向的旋转运动和夹持工具的开合运动。为了防止误操作造成对病人的伤害,应该实现基于机构的定点运动。系统原理图如图2所示。
该系统为双臂机构,每个机械臂有5个自由度,分别为绕r轴、v轴、z轴的转动,绕u轴曲线移动和沿v轴的手术器械的直线移动。其中,z轴和r轴的转动为摆动,v轴的转动为手术器械回转。通过u轴和r轴实现基于机构的定点(切口)运动,通过v轴和z轴转动实现末端工作装置的姿态变化。

图2 机械臂结构原理
各部分结构的设计
u轴曲线移动和r轴摆动结构的设计
微创手术是通过体表切口将手术器械伸入体内进行手术的,为防止误操作造成对切口的损伤,系统应具备定点运动特性。在机构设计过程中,采用半圆弧轨道机构和轴直接驱动摆动机构实现系统的定点运动。
半圆弧轨道机构如图3,为实现“定点”运动,只要确保患者的体表切口位于圆弧轨道的圆心处即可。这种结构简单,容易实现,驱动机构可以选择具有传动准确、可靠、运转平稳、承载能力大、体积小、效率高等优点的齿轮传动。在圆弧轨道外侧表面上加工成齿形结构,把动力源放置于轨道上面的滑块上,小齿轮的运动带动滑块沿u轴曲线移动。
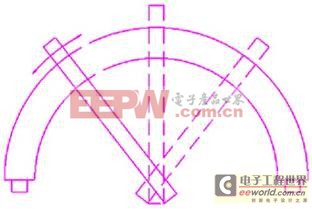
图3 圆弧轨道机构
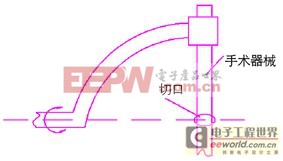
图4 轴直接驱动摆动机构
轴直接驱动摆动如图4,实现轴摆动的轴线过圆弧轨道的圆心即患者体表切口也可实现“定点”运动。

评论