发动机测试系统中can总线的应用

CAN桥接器的软硬件设计
CAN桥接器的设计是将RS-422电平与CAN标准的逻辑电平能够相互转换,同时使得RS-422和CAN的帧格式能够相互转换。系统采用了SJA1000控制接口芯片,SJA1000有BasicCAN模式和PeliCAN模式两种工作模式,本系统中选择了工作模式为基本型。SJA1000作为微控制器的片外扩展芯片,其片选引脚CS接在微控制器的地址译码器上,从而决定了CAN总线控制器各寄存器的地址。SJA1000通过CAN控制器接口芯片82C250连接在物理总线上。82C250器件提供对总线的差动发送能力和对CAN控制器的差动接受能力,完全和ISO11898标准兼容。其引脚8允许选择高速、斜率控制和待机三种不同的工作方式。
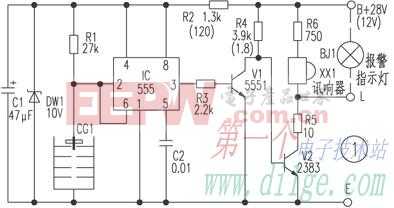
在图2所示的电路中实现了RS-422电平和CAN标准逻辑电平的相互转换,同时系统软件也实现了RS-422和CAN帧格式的相互转换,系统中CPU为AT89C52单片机。
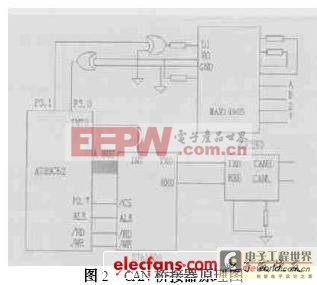
芯片MAX1490B完成了RS-422和TTL逻辑电平的相互转换,而芯片SJA1000则完成了TTL逻辑电平和CAN逻辑电平的相互转换,在MAX1490B中TTL侧和RS-422侧实现了完全电隔离,A、B为其RS-422侧输入端,Y、Z为RS-422侧输出端,DI为隔离的TTL侧驱动输入,RO为隔离的TTL输出端,MAX1490B内部的DCPDC 变换器在不需要外部隔离电源的情况下实现了输入输出的电隔离。82C250是CAN总线通信控制器,由其实现CAN的物理层和数据链路层,是CAN总线收发器,可支持多达110个节点的CAN总线负载。
测控设备的改造
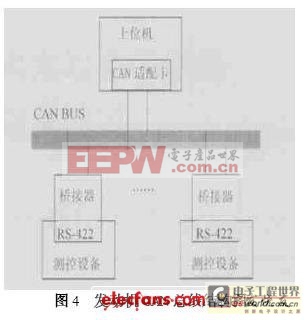
原有的系统采用了下位控制,即将控制权限和管理权限在每一独立的系统中单独实现,数据的输出,给定控制目标以及各种工况的信息打印均由前端机控制,上位机只是用来对系统进行简单的数据汇总通讯。在原系统中每个测控设备是孤立的,是信息孤岛,在改造过程中上位机中配置CAN适配器,用双绞线与CAN总线相连,在原测控设备上利用预留RS-422与CAN桥接器相连。在软件编程中,增加了单独的通信单元,不增加原有的控制系统的其他功能和软件开销,经过简单的软硬件改造后,形成了一个具有数据交互功能的测控系统。改造后的系统能够通过上位机对前置机进行控制工框的设定、数据采集汇总等,可以通过上位机对前置机进行控制,突破了原有系统的信息交互的障碍。系统拓扑结构如图4所示。
结束语
经过改造后的测控设备连成了一个CAN总线系统,突破了原有的信息孤岛的模式,原系统中的各种工作模式、各种控制目标给定由上位机管理,下位机通过接收广播、点对点方式和上位机通信,接受工况状态的转换以及控制给定等参数,同时定期上传其工作状态、测试数据等,上位机对其进行统一管理,实现了“分散控制,集中管理”的模式。上位机通讯管理软件的编制采用DELPHI5.0,在WIN2000下编译完成。
通过对原有系统进行总线升级改造,针对原有测试系统进行现场总线改造的尝试,也具有积极的实际意义。


评论