MAX9949/MAX9950参数测量单元PMU工作模式

表1说明如何使用IOS引脚配置芯片,以支持单极性ADC (本例中,-4V至+4V)或双极性ADC (0V至8V)。由此,客户可以针对其应用需求在较宽范围选择ADC。表1示例采用200µA量程(RSENSE= 10kΩ),但相同的设置适用于所有量程。
FIMV模式
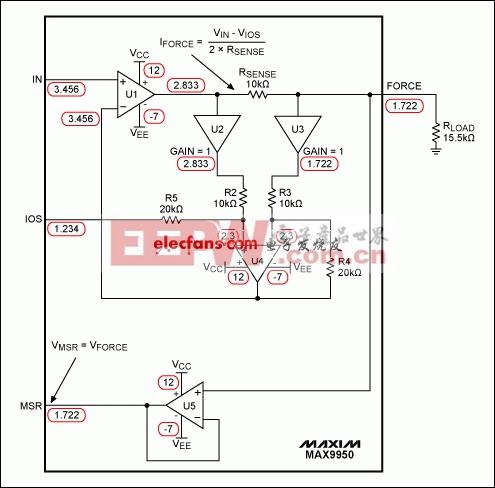
图2. 示例配置的FIMV模式等效框图
FIMV节点与FIMI模式基本相同,只是输出端或FORCE引脚电压由MSR引脚监测(图2)。FORCE引脚输出电流与图1完全相同,所有计算过程也相同。
FVMI模式
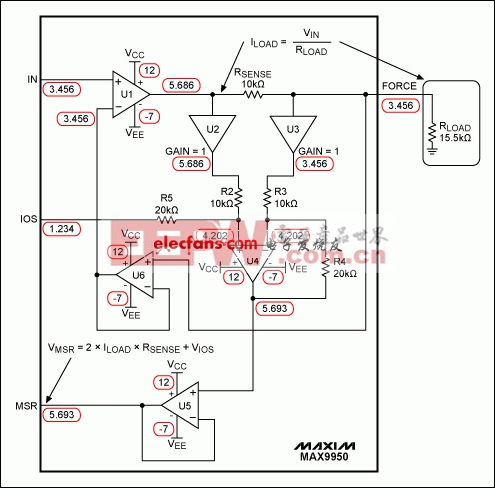
图3. 示例配置的FVMI模式等效框图
在FVMI模式下,FORCE引脚电压强制等于IN引脚电压(图3),因此,VFORCE= VIN。
从图3很容易看到这一点:
ILOAD= VIN/RLOAD= 3.456/15,500 = 222.97µA (式3)
因为RSENSE= 10kΩ,量程为200µA。但我们超出200µA FSR量程22.97µA。考虑到每个设定量程都有一定裕量,超出FSR指标,所以这个结果是可接受的。MSR引脚通过IOS引脚电压偏置为:VMSR= 2 × (ILOAD× RSENSE) + VIOS。
FVMV模式
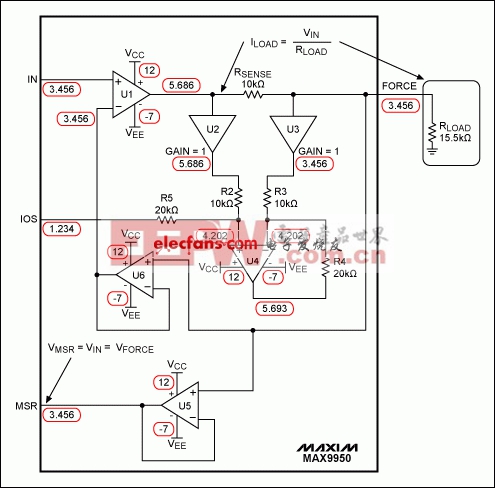
图4. 示例配置的FVMV模式等效框图
图4显示强制输出为IN电压,MSR引脚监控该电压或加压。因此,ILOAD= VIN/RLOAD。结论
本应用笔记在数据资料的基础上详细说明了MAX9949/MAX9950 PMU器件的四种主要工作模式,并给出了每种模式下的等效框图和设置示例,便于实际评估。





评论