汽车电子控制器的模态仿真技术研究(二)

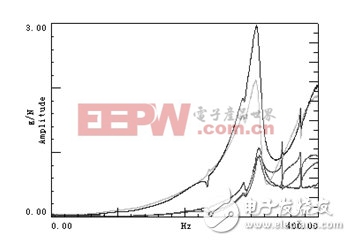
图14:若干点的频响函数
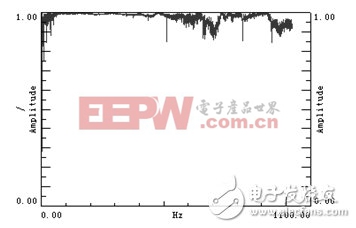
图15 :典型相干函数
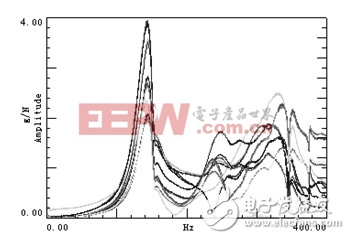
图16:若干点的频响函数
利用LMS TEST.LAB软件中的Time MDOF方法进行模态参数分析。根据所有测试点的频率响应函数之和建立稳态图,然后判定真实的模态频率、阻尼和参预因子。利用该方法测得的该控制器的前三阶模态频率和振型如图17-19所示。
图17:第一阶模态: 146Hz
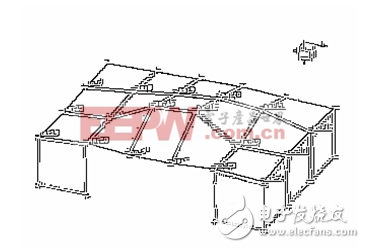
图18:第二阶模态: 236Hz
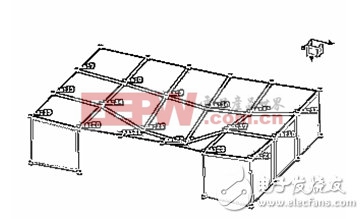
图19:第三阶模态:287Hz
5 计算和试验结果对比及分析
5.1仿真和试验结果对比
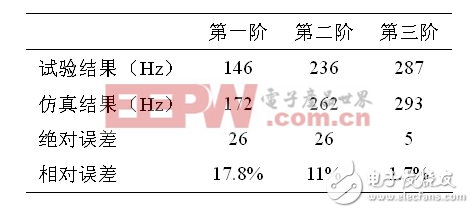
对比仿真分析和试验得到的前三阶振型,发现振型匹配很好;对比前三阶频率,发现最大相对误差将近20%,如表2所示。根据以上对比结果,可以判定该试验结果和仿真结果存在很大的误差。为了验证仿真分析方法是否可行,后文中将会对造成误差的原因进行分析。
表2:仿真结果与试验结果的对比表
5.2传感器重量的影响分析
单个传感器的重量为5克,控制器上布置多个传感器时会引入很大的附加质量。于是在有限元模型中添加传感器的模型,并在考虑单元











评论