利用匹配光栅解调来检测光纤光栅传感器的系统设计

本系统采用TMS320VC5402作为主控芯片。这种定点DSP芯片可实现光纤光栅传感信号的处理、步进电机的控制和显示等。该芯片具有强大的数据运算和处理功能,利用其RPT和MAC指令可以在单指令周期内实现乘累加运算。其灵活的循环缓冲区和高效的C语言可使TMS320VC5402方便地实现数据的循环寻址与卷积运算,从而实现高速度解调。
2.2 系统软件设计
DSP系统的软件部分主要由初始化程序、线性插值子程序或者曲线拟合子程序、显示程序、驱动程序、中断服务程序等几部分组成,可以将A/D转换和串行通讯代码放在中断服务程序中来实现。
初始化程序用于完成DSPI/O口、内部A/D转换器、串行口、中断等资源的初始化。为了协调A/D转换和步进电机的控制,可由DSP发出控制信号来控制步进电机,以使经过A/D转换所得的数字信号与加在匹配光栅上的步数一一对应。显示部分的程序可将此数字信号经代数变换转换为直接表示应力的数字量,然后通过查表动态实现应力显示。
当匹配光栅反射波长与光纤光栅反射波的中心波长重叠时,光电转换输出脉冲信号,并向DSP请求中断,然后由DSP执行中断服务程序,以将DSP内部A/D转换器转换所得的数字量读入DSP并保存起来,最后通过串行口发送到上位机再中断返回。
3 实验结果分析
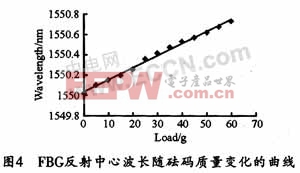
由实验可得,在砝码质量从0 g增加到60 g的过程中,粘贴在悬臂梁上的FBG1中心波长漂移0.716 nm,图4所示为FBG1中心波长随砝码质量变化的曲线图。由图4可知,悬臂梁上的FBG中心波长变化量与悬臂梁自由端所施加的砝码质量成较好的线性关系,并且具有较高的灵敏度。
实验中可通过增加砝码的质量施加对悬臂梁不断增加的拉伸应力。两个匹配光栅反射光信号分别被各自对应的光电探测器所接收。光电探测器输出的模拟电压信号则由以DSP为












评论