基于自适应观测器的三电平无速度传感器DTC 系统

2.3 增益反馈矩阵的选取
为了易于选择自适应全阶状态观测器的增益反馈矩阵,引入线性化分析方法,容易建模也容易分析[4]。将式(4)变换为
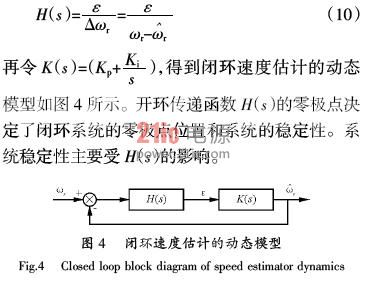
借助于闭环速度估计的动态模型,可以方便对选择的参数进行分析。当然还要借助于强大的Matlab 工具,便于选择增益矩阵和速度PI 参数。
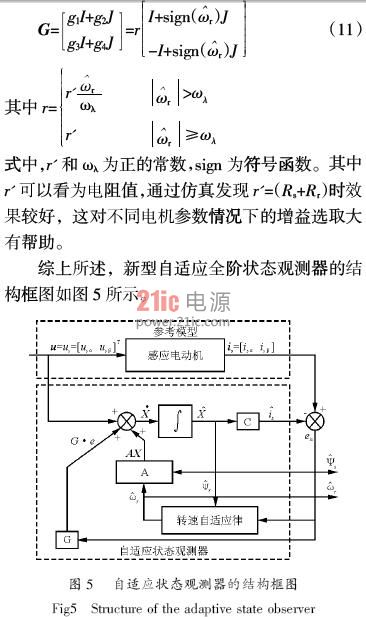
为了保证系统的稳定性,并使得系统有着快速的响应速度,结合零极点的位置和系统波特图[4]。选择出如下的反馈增益矩阵G。
3 三电平无速度传感器DTC系统
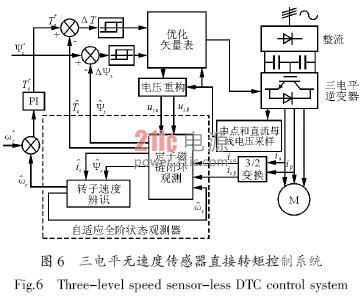
基于合成矢量表和自适应全阶状态观测器,可实现无速度传感器三电平异步电机直接转矩控制,其结构框图如图6 所示。整个系统分为两个模块:直接转矩控制模块和自适应全阶状态观测器模块。自适应全阶状态观测器的输入为三电平逆变器的输出电压us和定子电流is。自适应全阶状态观测器模块辨识出转速棕r 和定子磁链棕s,转速由速度自适应律的式(7)辨识出,辨识的转速参与控制,实现无速度传感器DTC运行。采用合成矢量的PWM控制策略,可以有效地将三电平逆变器的PWM 控制和异步电动机的DTC 控制加以分离,相对独立地实现不同的控制目标,从而避免了互相矛盾的问题,为提高控制性能拓展了空间。
形图。可见,采用新型自适应全阶状态观测器结构,系统在低速甚至于零速状态下可稳定运行,能够准确的观测出定子磁链和转速,且具有较好的动静态性能。另外,合成矢量方法较好的控制了系统中点电压,中点电压偏移控制在0.5 V 以内,如图(d)所示,并且简化了矢量选择,很好地抑制了dv/dt的变化,为提高控制性能奠定了基础。
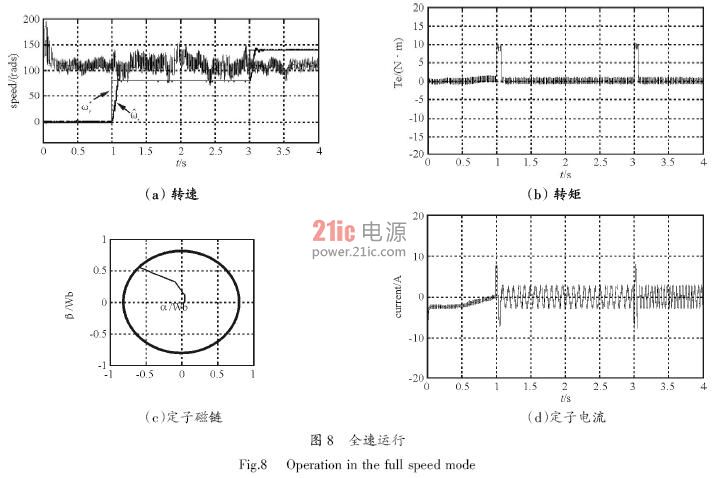
4.2 全速范围稳定运行
预设转速为1 rad/s,空载,仿真时间4 s,1 s后转速突变为80 rad/s,3 s后转速突变为140 rad/s。图8 为该情况下的波形图,(a)为转速波形,棕r* 为给定转速,棕r为辨识转速;(b )为对应的转矩波形图;
(c)为定子磁链的波形图;(d )为定子电流的波形图。可见采用合成矢量方法和新型自适应全阶状态观测器结构,系统在全速范围内稳定运行,并且具有良好的动静态性能。
5 结语
合成矢量方法为三电平逆变器实现DTC 算法提供了一个良好的接口,能有效地控制三电平逆变器的中点电压,并成功地防止了过高的电压跳变,显著简化了空间矢量选择。新型自适应全阶观测器方法能够准确地观测定子磁链,应用于异步电动机的DTC控制中具有出色的鲁棒性。实现三电平逆变器供电下的异步电动机无速度传感器运行,并在低速情况下也能达到良好的稳态和动态性能。仿真表明了这种方法的有效性。













评论