解析CAN—BUS数据总线

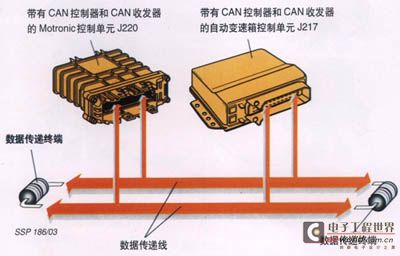
由发动机控制单元和变速器单元组成的CAN总线示意图
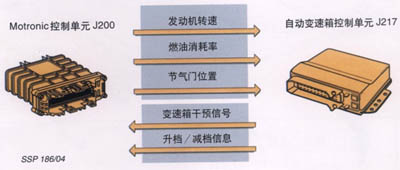
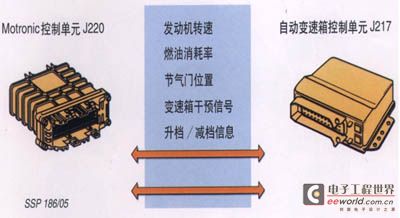
发动机控制单元与变速器控制单元通过CAN总线传递的数据内容
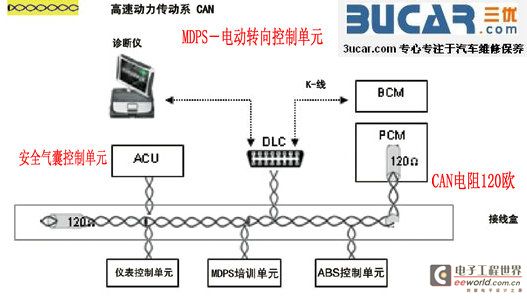
现代瑞纳CAN总线结构图
CAN系统又分为高速和低速,高速CAN系统用于满足发动机控制单元、变速器控制单元、ABS/ESP控制单元、安全气囊控制单元等对信息传输的实时性要求较高的控制系统;
低速CAN系统是舒适型,速度:125Kbps,主要控制仪表、防盗等。
CAN BUS数据总线传递数据内容:
CAN数据总线几乎一刻不停的,按照固定的通信协议,在控制单元之间进行数据传输。按照数据协议的要求,CAM总线上传输的数据最小单位为一个数据区域,开始域、状态域、检查域、数据域、安全域、确认域和终止域组成。
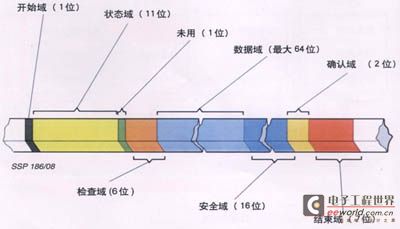
CAN数据总线传输数据的数据结构
CAN BUS数据总线双绞线结构:
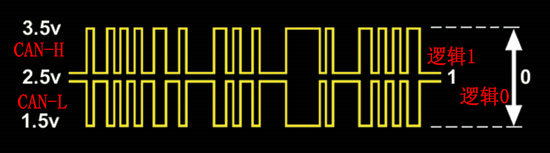
荣威350CAN数据总线信号波形图
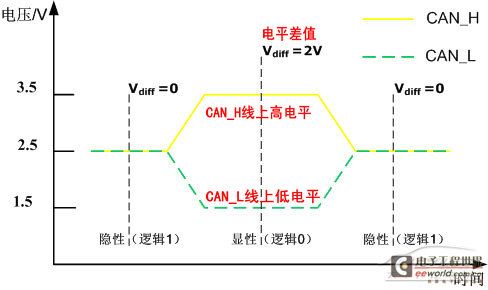
数据总线信号波形图









评论