清华大学教授攻克机器人最后1cm防线

2 机器人传感技术
本文引用地址:https://www.eepw.com.cn/article/201608/295741.htm传感是下一代机器人操作的第一步。研究机器人各脑区是怎样合作来进行跨模态信息处理的,是当今脑科学十大问题之一。

人工皮肤方面,我们大概做了三四年了。第一代的人工皮肤是电容式的皮肤,它中间层用得是硅胶材料,灵敏度不够好。后来,我们把中间整块的硅胶变成硅帧,像帧一样,中间有两层介质,一个是轨帧,一个是空气,所以灵敏度一下子提上去了。现在我们已经做到第三代了,工艺方面做得更薄了。
3 跨模态信息表征和目标识别

触觉与图像是同构的。如何理解这句话呢?图像就是一个一个点阵,每个点阵就是像素,大小是灰度;而触觉也是一个一个点,大小是力,因此触觉和图像是同构的,这样就可以将触觉的编码方法用于视觉里面。这一原理的一个应用就是盲人识图,比如在盲人的眼睛处装两个摄像机,将图像编成触觉编码,这样盲人可以通过手来感受外部的世界。
孙教授团队在视触觉信息的编码与融合方面做了大量的研究工作,主要贡献包括视触觉的线性动态系统稀疏编码(LDS-SC)方法和三线程卷积神经网络触觉编码方法,以及基于联合稀疏编码和基于扩展贝叶斯概率推理的视触觉融合方法。
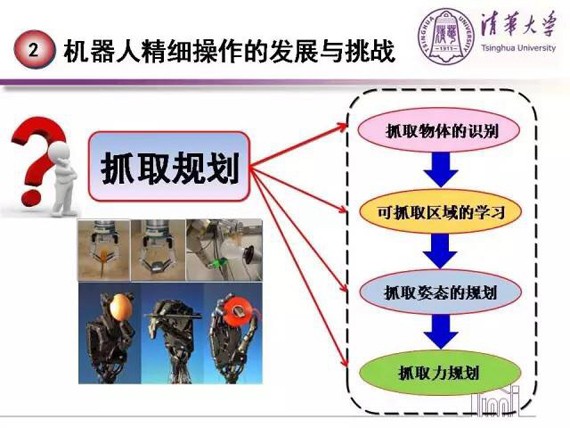
4 精细操作
上面的问题告诉机器人在什么样的环境下,这个物体是什么,那么,机器人怎样操作这个物体呢?










评论