利用C2000 MCU实施并网微型太阳能逆变器

2、 入网电流控制器。电流控制器可确保输出电流为正弦波,并遵循电流基准,从而平衡输入功率和输出功率。
3、 最大功率点追踪(MPPT)。MPPT用于让太阳能板进入最大功率输出状态。
3.2 固件结构
3.2.1 后台与任务
整个固件系统为一个前向后台系统。图15显示了该后台结构。
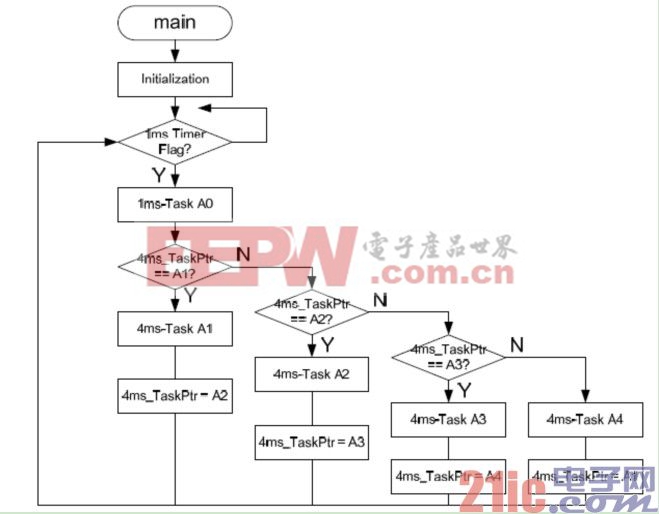
图15后台结构
本系统中,有一个1ms任务和四个4ms任务。
1、1ms任务A0。1ms定期任务。在这种任务中,LED控制执行。除此以外,PLL控制器也位于该任务中。
2、4ms任务A1。A1 4ms定期任务。状态机处理器。
3、4ms任务A2。A2 4ms定期任务。所有测量均在该任务中计算。
4、4ms任务A3。A3 4ms定期任务。用户键检测便在这里,同时检测超出或者未达到运行状态范围,并发出故障指令。
5、4ms任务A4。A4 4ms定期任务。MPPT控制器与调试支持。
3.2.2 系统状态机
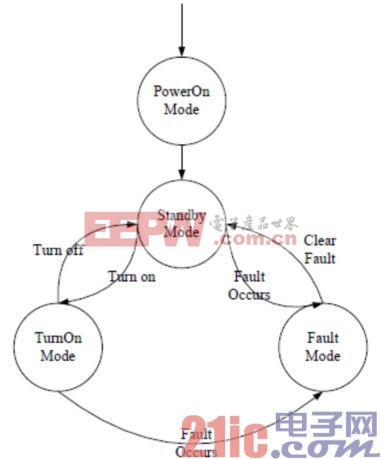
图16状态机
图16显示了任务A1中处理的状态机。不同状态代表不同的运行模式。
本系统中共有4种状态模式:
l 上电
l 待机
l 开启
l 故障
上电模式是系统上电的一种过渡模式。在这种模式下,系统进行一些初始化,之后,系统便自动进入待机模式。
待机模式是系统等待开启指令的一种模式。所有PWM和SCR控制信号都关闭。在这种模式下,所有测量均有效。系统探测外部状态,并检查系统是否可以开启。
当系统成功地从待机模式启动以后,系统进入开启模式。这种模式下,所有PWM和SCR控制信号均开启。系统开始向电网输电。
如果出现故障,系统进入故障模式,所有PWM和SCR控制信号均关闭。如果故障清除,则系统自动返回待机模式。
3.2.3 中断服务程序
本系统的中断服务程序(ISR)具有如下功能:
l 读取ADC结果和部分测量计算。
l 入网电流控制器
l SCR开/关控制
l 紧急保护。一次侧冲击电流、二次侧过电压和输出电流保护。
l 调试支持。把调试数据记录到缓冲器。
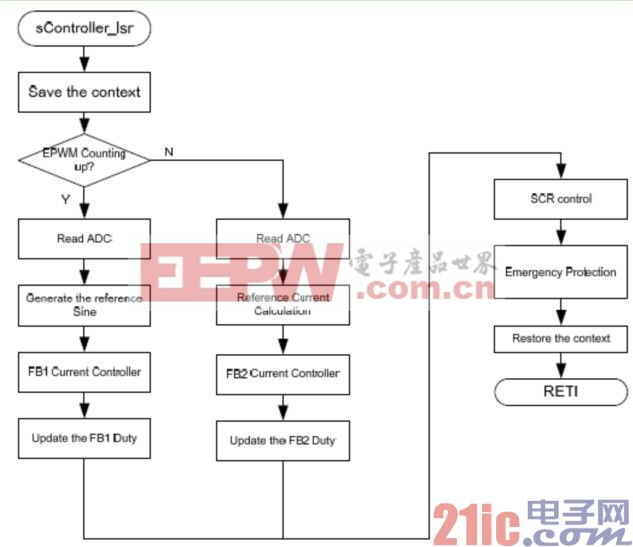
图17 ISR流程图
3.3 入网转换器控制器
图18显示了整个入网转换器结构。
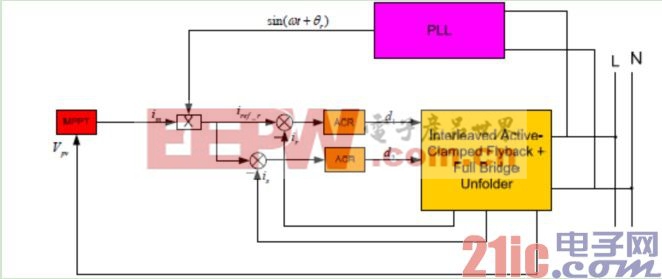
图18控制器结构
3.3.1 PLL控制器
图19显示了PLL控制器系统
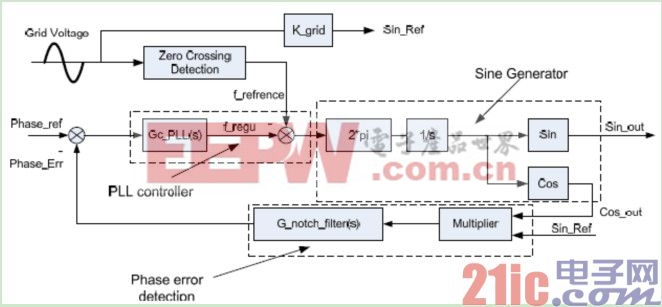
图19 PLL控制系统图
PLL系统由如下几部分组成:
相位误差检测。检测基准和正弦波输出之间的相位误差。该检测功能在1ms
任务A0中实现。
PLL控制器。闭环控制器,控制器在1ms任务A0中执行。
正弦波生成器。根据频率和采样时间生成正弦波;在ISR中完成这项工作。
3.3.2 电流控制器
为了设计电流环路,必须首先建造对象模型。这里可以使用小信号模型。
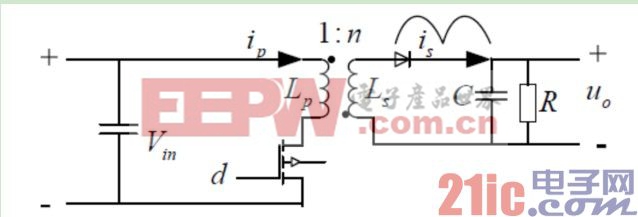
图20反激电路
假设反激电路如图6所示;另外,假设其在连续模式下工作。
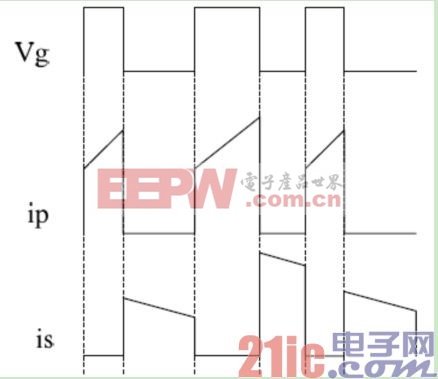
图21反激连续模式电流
如果一次侧的MOS开启,则一次侧电流增加,Lp充电,并且能量被存储在其内部。因此,可得到如下方程式:

如果Q1关闭,则能量被立即传输至二次侧,ip很快降至零。在二次侧,二极管开启,次电感接过负载,并对C充电。可得到方程式(2)。

主电感Lp和次电感Ls具有如下关系:
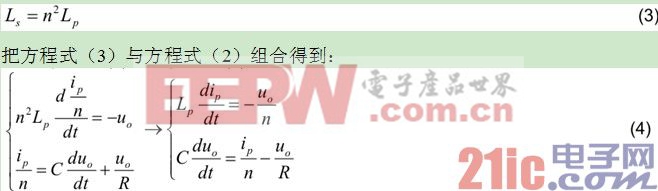
利用这种平均状态空间方法,如果占空因数为d,则可以得到如下方程式:







评论