LabVIEW NI SoftMotion和C系列驱动接口入门

完成以下步骤,将NI 9512驱动接口连接到P70530直流驱动或者P70360交流驱动和其它I/O。图10中是一幅简化的连接图。
1. 根据机箱文档说明,在机箱中安装模块。
2. 采用NI 9512-to-P7000线缆,将D-sub连接头模块连接到P7000系列驱动上的Command I/O连接头上。该线缆为步进式输出、驱动使能输出和驱动错误信号提供连接。
3. 将电源连接到NI 9512-to-P7000上的直接连接线缆+24 V输入。
4. 采用接线盒线缆,将MDR连接头模块连接到37管脚的接线块上。
5. 将硬件设备上的其它I/O信号连接到37管脚接线块或者自定义线缆上。参考图11了解接线盒的引脚。
a.将接线块上的Forward Limit(前向限位)、Reverse Limit(反向限位)和Home(原点) 输入连接到限位和原点传感器上。
b.如果你使用编码器来反馈位置信息,则请将编码器的输入连接到编码器上。
c.采用所提供的接线端,连接所有额外I/O。
6. 将驱动电源连接到P7000驱动上。

图10. NI 9512-to-P7000系列驱动连接图
注意:如果只需要将MDR连接头连接到接线盒上,则接线盒上的所有D-Sub信号都是无连接(no connects,NC)。图11中显示了只连接MDR连接头时的37管脚接线盒的引脚。
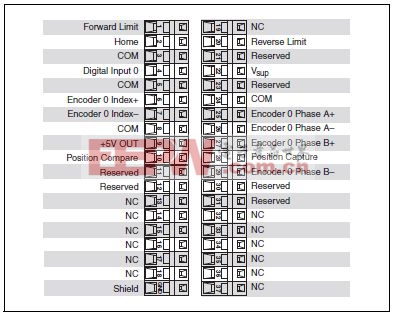
图11. NI 9512 37管脚接线块只连接MDR时的管脚分配
7. 在控制器中安装软件,创建一个LabVIEW项目,并添加NI SoftMotion轴。
8. 在项目浏览器窗口中右击轴,并从快捷菜单中选择属性,打开轴配置对话框。
9. 针对P7000驱动,在轴配置对话框中改变下述项目的默认轴设置:
a. 右击轴,并从快捷菜单中选择属性,显示轴配置对话框。
b. 在步进电机页面中,将输出方式设置为单端。
c. 在运动I/O页面的驱动信号标签页中,将驱动使能信号的输出方式设置为源输出。
d. 在数字I/O页面中,将驱动器错误/报警映射到DI 1,并将输入方式设置为源输入。
10. 在项目浏览器窗口中单击控制器项目,并选择部署全部来部署轴信息。
连接到伺服式驱动器
伺服式轴的配置
伺服式轴只能以闭环模式运行,所以必需有一个反馈设备。如果你使用NI 9514或者NI 9516驱动接口模块,那么你必须另外对反馈设备、伺服控制环和伺服驱动的驱动命令输出进行配置。图6中显示了NI 9514和NI 9516 C系列模块的轴配置对话框部分。无法配置的部分以灰色显示。

图6. NI 9514和NI 9516模块的轴配置对话框
使用增益调节测试面板
使用Gain Tuning Test Panel(增益调节测试面板)来调节控制环的设置,并计算伺服轴的相对稳定性。参考NI SoftMotion LabVIEW帮助中的“使用增益调节面板”部分,了解关于增益调节面板和伺服式系统调节指令方面的详细信息。
右击项目浏览器窗口中的轴,并从快捷菜单中选择交互式测试面板,访问增益调节面板。
您所学到的东西
本指南中,分析了使用LabVIEW NI SoftMotion和NI 951x C系列模块来开发运动应用中的几个概念,如下:
NI 951x模块与大多数C系列模块的不同之处在于,当你使用扫描接口模式的时候,不能直接在项目浏览器窗口中对它们进行配置,而且模块中不能直接获得I/O变量。
你必须使用NI SoftMotion向RT目标中增加轴,并将它们与NI 951x模块相关联,以期以扫描接口模式配置并使用它们。然后,你可以在VI中使用与这些轴相关联的运动I/O资源。
NI SoftMotion轴使用Axis Configuration对话框进行配置。
NI SoftMotion功能块允许你使用功能块编程方式来创建确定性运动控制应用。
NI SoftMotion功能块为高级状态监测提供了状态输出。











评论