LabVIEW NI SoftMotion和C系列驱动接口入门

3. 重复步骤2,在前端面板中,分别为position(位置)、velocity(速度)、acceleration(加速度)和acceleration jerk(加加速度)这几个输入增加控件。
4. 将deceleration(减速度)输入连线至acceleration(加速度)输入,将deceleration jerk(减减速度)输入连接至acceleration jerk(加加速度)输入。在有些应用中,减速度值可能必须与加速度值不同,但本应用中二者相同。
5. 从LabVIEW 项目中将坐标空间1资源拖至定时循环外部的方框图中,并将其连线至功能块上的资源输入。
6. 在定时循环内部放置另一个Line功能块。
7. 将Line功能块的错误接线端和资源接线端连接在一起。
8. 将第一个Line功能块的完成输出连线至第二个Line功能块的执行输入。
9. 将第二个Line功能块的velocity(速度)、acceleration(加速度)、deceleration(减速度)、acceleration jerk(加加速度)和deceleration jerk(减减速度)输入连接到步骤3中所创建的控件上。这将使得第二个功能块的运动参数值和第一个功能块相同。
10. 右击位置输入,并从快捷菜单中选择创建»输入控件,向前端面板中增加第二个位置信息的控件。
11. 向方框图中增加一个合并错误VI,并将Read功能块和第二个Line功能块的错误输出连线到合并错误 VI。
12. 右击合并错误 VI的错误输出输出,并从快捷菜单中选择创建»显示控件,向前端面板中增加一个显示控件。
13. 将错误输出连线到定时循环的边沿。
14. 在为错误输出所创建的循环通道上右击,并从快捷菜单中选择替换为移位寄存器。这会将错误信息传递给下一个循环迭代。
15. 将错误输出连线到定时循环另一侧的移位寄存器上。
16. 右击移位寄存器,并从快捷菜单中选择创建»常量,初始化定时循环外部的错误簇。因为最终的硬件会使用LabVIEW实时模块,所以要在定时循环外部初始化所有功能块阵列(array)和簇(cluster),以避免系统抖动。在定时循环内部,在那两个Line功能块底下放置一个Read功能块。
一般是在主机上(而非在确定性定时循环中) ,通过读取目标发布的数据来读取并绘制位置信息。为了简化,本例中包含了数据读取部分。
17. 将资源和错误输出连接到第一个Line功能块的资源和错误输入上。
18. 为位置[]输入创建一个常数,并将该矩阵的前两个元素设为0。将位置[]常数移出定时循环。这样初始化阵列可以无需为功能块分配内存。
19. 右击定时循环的条件接线端,并从快捷菜单中选择创建»输入控件,向前端面板中增加一个停止按钮。这将允许你在任何时候停止运行VI。
完成上述步骤后,你的方框图应该与下图类似:
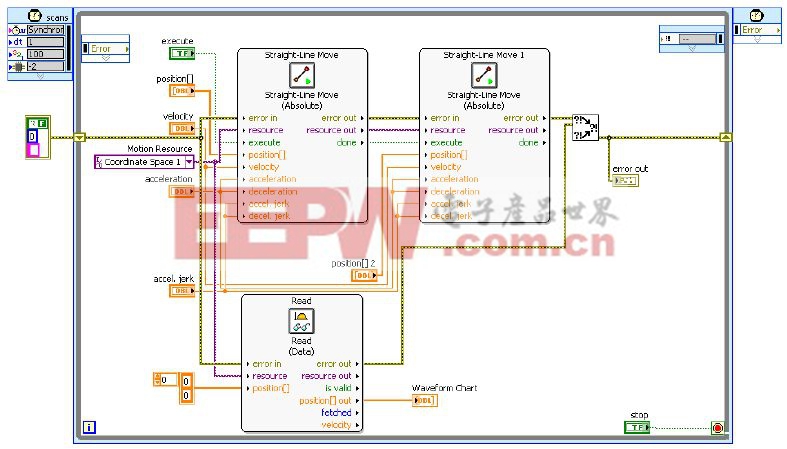
图8. 程序框图
切换到前面板。
23. 在 位置[]数组中,将数组的前两个元素设为5000。这将指定一个x y坐标(5000, 5000)。











评论