基于计算机的机床测试系统设计

加载控制: 3路
总计DI:24路,AI:8路,DO:18路,AO:6路。
本系统采用的输入输出接口卡均为PCI总线,由于测试和控制量较多,所以采用了三块接口卡,通过硬件调线,设置其基地址分别为300H和330H。模拟信号输入输出通道相互独立,分辨率为12位,其信号范围如下:
输入范围:-10V~+10V
输出范围:-10V~+10V
接口卡的数字输入输出信号与TTL电平兼容,易于和其他部分相连,特性如下:
输入低电平VIL≤0.8V
输入高电平VIH≥2.0V
输出低电平VOL≤0.5V
输出高电平VOH≥2.4V
为了保证系统运行的安全性,系统还采用了一块隔离驱动卡,通过光电隔离等手段来保证计算机信号和外界信号的隔离,并把接口卡的输出信号放大为伺服驱动器和离合器等所需强度控制信号。
运动控制模块
主要包括伺服系统和加载系统。伺服系统由伺服电机驱动器、伺服电机和光电码盘组成,其主要作用是控制测试过程中被测减速器按照一运动规律运 转。本系统中,采用了3套松下(MINAS)伺服系统分别控制X、Y1、Y2三轴,该系统有速度控制、位置控制和转矩控制三种控制方式,能满足测试过程中 的各种运动控制要求,在使用前,需进行参数设置,有关参数设置如下:
NO.25=10000, NO.26=7200
NO.27=1, NO.29=3
伺服驱动器受计算机接口卡控制,接口卡的伺服指令输出为+3V时,伺服电机转速为1500转/分。计算机还通过接口卡控制伺服驱动器的符号 位、输出禁止、SV-ON位和C-MODE位。符号为1时对应CCW方向(正转),脉冲输出为1时禁止有效,SV-ON低电平有效,C-MODE低电平为 速度控制方式,高电平为位置控制方式,在测试过程中,根据测试项目不同,计算机按照程序改变这些控制信号,使伺服电机工作于不同方式和状态。
加载系统主要负责向轴端提供虚拟负载,加载控制器接受计算机输出的模拟信号,并根据这个信号调整加载装置流过的电流,进而控制轴端转矩。
传感器模块
接近传感器选用量程为20mm,输出电压为0~5V的WYD系列直流位移传感器,该传感器与电子电路集成一体,安装使用方便,不需外加放大 器,可直接与计算机输入输出接口卡连接,进行模数转换及数据处理,进而把相对位移的微变量提供给计算机,系统共采用8个接近传感器测试调高精度。
转矩传感器选用JN338转矩传感器,该传感器可实现能源及信号的非接触传递,并做到了传递与是否旋转无关,与转速大小无关,与旋转方向无关,输出信号为脉冲信号。
增量式光电编码器作为速度和位移传感器,它的输出一方面提供给伺服系统进行运动控制,另一方面供计算机采集,计算机通过软件对编码器输出信号进行转换和计数,计数总值与脉冲当量的积即为位移量,而短时间内的位移量即为瞬时速度。
接口软件开发
系统接口软件主应用程序是在Windows操作系统下,用可视化程序开发工具Visual Basic6.0开发的. 软件操作界面采用Windows风格,其框图如图2所示。
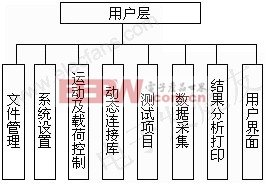
图2 系统软件框图
Visual Basic6.0是一门功能强大的计算机高级可视化编程语言,但却不能直接访问计算机输入输出接口,为了解决这一问题,系统用C++语言编制了一个动态连 接库(DLL),对硬件端口的访问功能全在连接库中实现,当需要访问某个端口时,调用相应的连接库函数,进行动态连接。这样不但实现了预定功能,而且使软 件结构优化,节约了大量系统资源。
结论
以本系统设计的机床测试系统,运行平稳,界面友好,操作方便,控制精度高,定位精度X轴Y1轴Y2轴都达到了0.024mm,重复定位精度X轴Y1轴Y2轴都达到了0.015mm。








评论