滚珠螺母形位误差的CCD测量

坐标变换的步骤是:首先对图像i (i=1,2,…,N)进行平移,使内螺纹外圆柱面中心与坐标原点重合;其次选择某个标定系数进行比例变换,使N个图像中的零件(以外圆半径为准)具有相同的像素数;然后将图像以原点为中心旋转360°(N-i) /N;最后平移回到原始位置(采集位置)。可根据各个测球中心坐标在统一坐标系中的位置求得圆度误差。
本文用解析方法确定各测球的分布中心(评定圆度的基准),使滚道圆度误差的评定符合最小区域法。设某一螺距范围内所有测球的球心坐标为(X0i, Y0i)(i=1,2,…,N),它们在端面上的理想分布应当在一个圆上。事实上,由于内螺纹滚道及测球的加工误差及测量误差,它们的分布是有误差的。以N个测球球心坐标(X0i, Y0i)为拟合点,利用解析方法求出测球中心分布圆的圆心(X0*, Y0*),使其在评定圆度误差时满足最小区域原则。算法步骤如下:
=m+1,m+2,…,N+i-1),构造直线方程L′。
(2)分别求L与L′垂直平分线的交点Ow,以该点为圆心经过4个点做两个圆,其半径差即为最小区域法评定的4个点的圆度误差。应时时判断每一次计算的圆度误差,满足最小区域条件时即停止计算,此时的圆心Ow即为最小区域圆圆心(X0*,Y0*),否则转步骤(3)继续计算。
(3)i从1到N做循环,返回步骤1重复计算。上述循环计算中,从外到内的循环次序是i-g-m-k。满足最小区域条件时,最小区域圆圆心至各测球中心距离中,至少各有两个最大值Rmax及两个最小值Rmin,且两最大值坐标点连线与两最小值坐标点连线的交点在最小圆内(最大值点与最小值点相互交替)。最小区域圆圆心(X0*, Y0*)至(X0i, Y0i)的最远点(Xmax,Ymax)距离与最近点(Xmin,Ymin)距离之差即为圆度误差,用下式表示:

在内螺纹整个滚道内确定M个假想截面位置,重复测量每个位置的圆度误差,取最大值作为内螺纹公称直径的圆度误差。
4.2 滚道圆柱度误差测量
在圆度误差计算中,已经获得了M个位置的测球分布中心(X0i*, Y0i*)(i=1,2,…,M)。同计算圆度采取的方法相同,将M个位置的数据统一在一个坐标中,共得到N×M个测球中心坐标,对它们进行圆度计算,可得到内螺纹公称直径圆柱度误差。
4.3 滚道同轴度误差测量
同轴度误差是一种位置误差,它是指被测轴线对基准轴线的变动量。在圆柱度误差测量中,M个截面位置的测球分布中心(X0i*, Y0i*)是变化的,它的离散轨迹体现了被测轴线,而内螺纹外圆柱面的中心(Xb, Yb)是基准轴线。根据同轴度误差的最小区域评定法则, (X0i*, Y0i*)与(Xb, Yb)距离的最大值的两倍为内螺纹公称直径对其外径的同轴度误差。
4.4 滚道圆跳动误差测量
在圆度误差及圆柱度误差测量中,测球球心坐标(X0i, Y0i)及螺母外圆柱面中心(Xb, Yb)已经求出,根据定义,分别计算(X0i, Y0i)至(Xb, Yb)的距离Ri,则该截面滚道圆跳动误差为Rimax-Rimin。求解全部M个截面的圆跳动误差,其最大值即为内螺纹滚道对基准(内螺纹外圆柱面轴线)的径向圆跳动误差。
4.5 实验
本实验依据提取的边缘,应用开发软件按前述几何参数的计算方法,测量了内螺纹滚道的形位误差。采集6个滚道截面进行测量(M=6),每个滚道截面采集12个图像(N=12)。图4为测球边缘坐标和中心坐标(X0i, Y0i) (i=1,2,…,N)及其亚像素值(X0i', Y0i'),内螺纹外圆柱面的亚像素中心坐标(Xb, Yb)为(1026.349,751.128)(像素值)。计算出一个螺距范围内12幅图像的测球参数,以螺母外圆柱中心为基准经过旋转、平移等变换统一到一个坐标系中,结果(像素值)如表1所示。
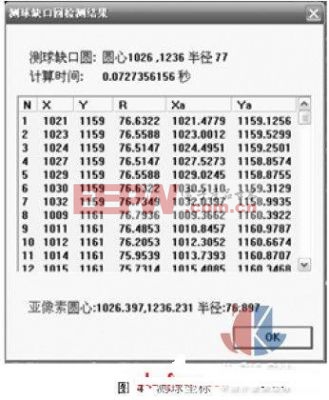
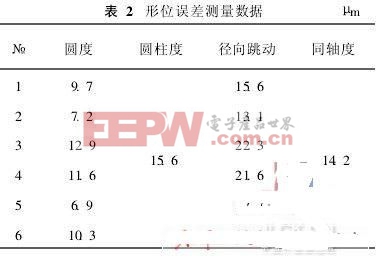
根据表1中数据,由整像素坐标按前述最小区域评定法求得圆度误差为: f=0.731,最小区域圆圆心坐标为(1026.134,750.866);而根据亚像素坐标求得的圆度误差为: f=0.449,最小区域圆圆心坐标为(1026.210,750.920)。该图像的标定系数k=0.025 8,按整像素计算圆度误差为0.731mm×0. 025 8= 0. 018 9mm,按亚像素计算圆度误差为0. 449mm×0. 025 8=0. 0116mm。对应表1中的数据,求各个测球中心至螺母外径中心之间的距离,其最大差值作为径向圆跳动误差值,计算结果为21. 6μm。最小区域圆圆心至螺母外径中心之间距离的2倍为该截面滚道中心相对于基准轴线的同心度误差,计算值为12. 9μm。6次亚像素测量结果见表2。

所测螺母形位误差结果为:圆度误差为0. 013mm,圆柱度误差为0. 016 mm,径向跳动误差为0. 022 mm,同轴度误差0. 014 mm。由文献[2]可知,本文所测螺母的几何尺寸及形位误差项目中,除圆度误差(公差为12μm)外,其余均符合技术要求。
3.4.3 实际脉冲波形和原因
利用数字示波器观察测量脉冲波形,发现数字示波器观察到的两种接法测量波形与图3、图4 所示的波形有很大差异,其波形见图7、图8,测量数据存在较大误差,其原因是当瞬时通断测量仪测量部分的触发电平在图3、图4 的波形所示的脉冲沿上时,则瞬时通断测量仪可以测量到脉冲,否则测量仪将测不到信号,所以需要进行脉冲波形调试;经分析,产生这样的问题原因是:由于脉冲发生器存在输出阻抗,瞬时通断测量仪的测量部分也存在输入阻抗,它和脉冲发生器输出阻抗构成的回路中必然存在电压分配,在脉冲作用时同样存在电压降,这种电路的分压作用必然引起脉冲幅度的减小。

接地电阻相关文章:接地电阻测试方法






评论