微处理器在导航设备模拟信号处理中的应用

摘要:介绍了一种微处理器在某导航设备中模拟信号的处理思路和算法,有效地提高了设备的系统集成度,达到提高设备可靠性的目的。
关键词:微处理器;差动方位;磁方位
机载近程无线电导航设备可以为飞机驾驶员提供飞机所在位置信息以及航向信息,即可以连续地给飞机提供方位和距离数据,数字化的方位和距离信息可直接在数字指示器上显示。为了更直观地反映和观察飞机的位置及航向,需要将数字方位进行调制,变换成模拟的差动方位信号,以提供给飞机的模拟航向位置指示器,指示飞机的航向信息。
在早期第一代导航设备中,采用大量分立元件和同步发送器、感应器、齿轮等机械传动方式完成差动方位的产生。到了第二代导航设备,去掉机械传动部分,采用大量的中、小规模数字及模拟集成电路,完全依靠硬件电路完成数据的运算和处理。以上两种方式由于采用的元件数量多,并且有机械传动装置,因而存在较多的不可靠因素,且数据处理误差大,受环境条件影响大。在现代无线电导航设备中,大量采用微处理器完成系统的控制和数据计算,减少和取掉了许多中、小规模集成电路、分立元件等,计算精度及可靠性、稳定性等都有了较大提高。
1 硬件设计
1.1 硬件原理
根据“差动方位=数字方位-磁方位”的关系,要得到差动方位,必须知道数字方位和磁方位,其中数字方位在导航设备中可从接收的地面信标台的信号中解算而得到,而磁方位信息是由飞机输入到导航设备的,它是X,Y,Z三相400 Hz交流信号,因此,首先将磁方位信号经过交直流变换,使磁方位信号在交流基准信号(AC1.5 V/400 Hz)的作用下解调并转换成直流电平,该直流电平随着磁方位的不同而变化,再通过A/D转换器将磁方位信号进行量化处理变成数字量。
将数字方位与数字化的磁方位进行计算得到数字化的差动方位,然后将数字差动方位通过D/A转换器,在交流基准信号的作用下,调制转换成X,y,Z三相400 Hz交流差动方位信号输出。
1.2 电路的选取
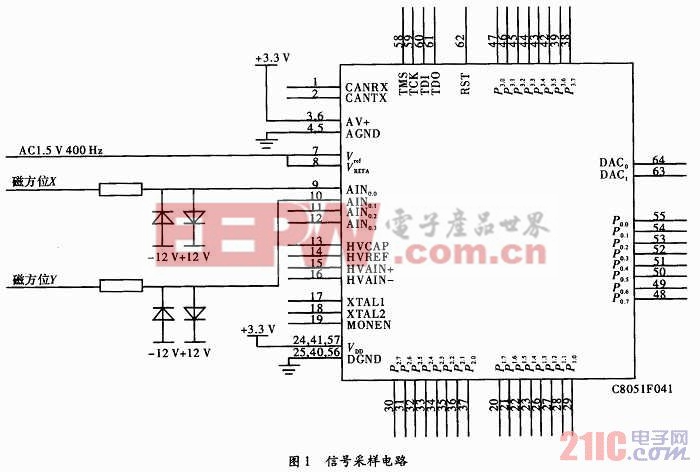
根据信号处理的特点,为使硬件规模最小化,选取微处理器为C8051F041,其内部包含64 kB的Flash,4 kB的数据RAM,多通道12 bit的ADC和双通道的12 bit的DAC,内部3~24.5 MHz可编程的时钟源;运算放大器选取性能较好、低温漂的OP11;由于输出的差动方位为模拟信号,须驱动模拟表头,需要的电流较大,采用大电流的运算放大器SFH51作为最后输出。
2 硬件的实现
2.1 交直流变换及ADC
在C8051F041中有一多通道12 bit的ADC,将磁方位X,Y分别由模拟通道AIN0.0/AIN0.1输入,基准信号由VREF’和VREFA输入。MCU分时对X/Y两路信号进行采样、变换,电路如图1所示。










评论