微处理器在导航设备模拟信号处理中的应用

2.2 数模变换(DAC)
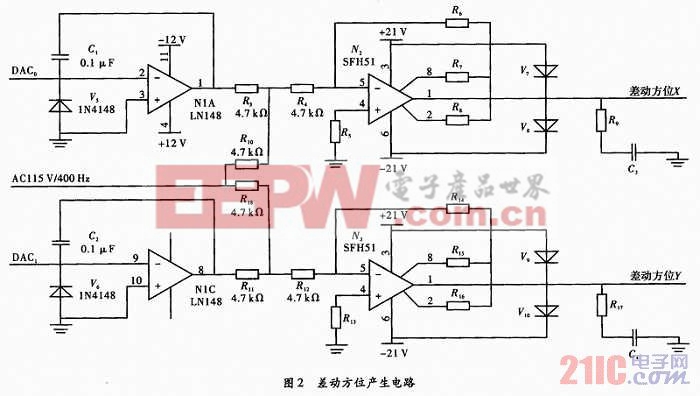
当从磁方位信号中解调出磁方位角后,可以计算出差动方位角度,根据具体硬件电路参数,可进一步推算出该角度对应的DAC转换需要的数字量,然后将数字量送入DAC中,在交流基准的调制下便可得到模拟的差动方位信号,电路如图2所示。本文引用地址:https://www.eepw.com.cn/article/187510.htm
3 软件的实现
3.1磁方位解算
对于三相磁方位信号X,Y,Z,通常Z接地。假设磁方位为φ,则有

根据前面分析,VXZ即为磁方位信号X的ADC采样值,VYZ为磁方位信号Y的ADC采样值,由此可根据上述公式计算出磁方位角度。
3.2 差动方位产生
根据差动方位信号的要求和电路参数计算,差动方位X和差动方位Y分别表示为
![]()
其中,θ为数字方位;φ为磁方位,ω=2πft,f=400 Hz;根据实际电路模型,有

其中,DX为差动方位X向数模转换器的数字量;DY为差动方位Y向数模转换器的数字量。
4 结束语
通过上述硬件线路设计和软件设计,开展了相关课题实验,并应用到某导航设备中,其集成度和可靠性得到了进一步提高,指标均达到了设计要求。









评论