IGBT强驱动电路的设计

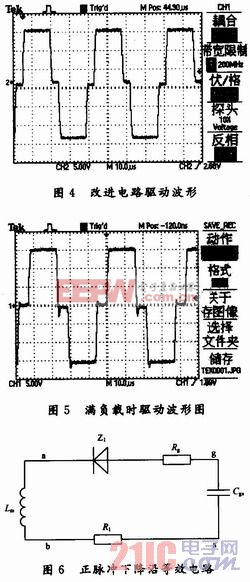
改进电路部分所加器件可以看成一个可变电阻:这个电阻在脉冲上升沿开始到IGBT弥勒平台时(t0~t2),电阻值是很小的,主要是充电电流从加速电容这条支路流过,从而不断加快对IGBT门极电容的充电。IGBT的弥勒平台这段时间内,随着电容上电压升高,其充电电流速率在逐渐减小,到弥勒平台结束时,其充电电流速率为零,充电电流达到最大。这个可以从门极电阻上电压波形得到证实。在上升沿结束(t3)时,充电电流减小到几乎为零,从而不会出现过冲尖峰。在加速电容前加一个反向二极管阻断其快速放电通道。图3是原始的驱动波形图;图4为附加电路驱动波形;图5为满负载时驱动波形图。
2 驱动电路改进方法分析
图1中用框标出的电路就是对原有驱动电路的改进。通过在门极增加稳压管、二极管、电容和电阻,可以较好地吸收上升沿、下降沿和尖峰。
由图3和图4比较可以看出,在较小延时的情况下,应把尖峰减到最小。从图3可以看出,要减小的尖峰主要是负脉冲后沿的过冲尖峰,因为这个尖峰极有可能达到IGBT的开启电压(Vth),这样就会造成同一桥臂的两个IGBT直通;同时由图5可以看出,在满负载(600 V/30 A)状态下,驱动波形具有很好的稳定性,而且没有大的尖峰,这就保证了IGBT稳定、安全的工作。





评论