一种霍尔电流传感器的电路设计


2.4 反馈电路
零磁通霍尔传感器利用磁平衡原理:一次侧电流(被测电流)所产生的磁场,通过二次线圈电流进行补偿,使磁芯始终处于零磁通工作状态。当Io刚通过磁环,Is尚未形成时,霍尔元件检测出N1I0所产生的磁场信号,经放大级放大,推动驱动级。由于N2为补偿线圈,通过线圈电流不会突变,因此,Is逐渐上升,N2Is所产生的磁场补偿了N1I0所产生的磁场。因此,霍尔元件输出降低,Is上升减慢。当N2Is=N1I0时,磁场为零,霍尔元件输出为零。但由于线圈的缘故,Is还会上升,这样,N2Is>N1I0,补偿过冲,霍尔元件输出变号,输出驱动级使Is减小。如此反复在平衡点附近振荡。可以在反馈线圈上接一个精阻,通过测量电阻端的电压,计算Is的大小,通过N2Is=N1I0计算通电电流I0的大小,一般情况下N1=1。
2.5 不等位电势补偿
不等位电势是霍尔元件在加控制电流而不加外磁场时出现的霍尔电势,称其为零位误差。在分析不等位电势时,可将霍尔元件等效为一个电桥,控制电极1、3和霍尔电极2、4可看作电桥的电阻连接点。它们之间分布电阻R1、R2、R3、R4构成4个桥臂,控制电压可视为电桥的工作电压。
理想情况下,不等位电势UM=O,对应于电桥的平衡状态,此时R1=R2=R3=R4。如果霍尔元件的UM≠O,则电桥就处于不平衡状态,此时R1、R2、R3、R4的阻值有差异,UM就是电桥的不平衡输出电压。只要能使电桥达到平衡的方法都可作为不等位电势的补偿方法。
本系统中不等位电势补偿方法为:在I0=0的情况下,系统上电,用万用表测试传感器的输出引脚电压值是否为零;为零则表示不等位电势UM=0。如果不等于零,用螺丝刀调节电位器W104390E使UM=0。
2.6 温度补偿问题
由于载流子浓度等随温度变化而变化,会导致霍尔元件的内阻、霍尔电势等也随温度变化而变化。这种变化程度随不同半导体材料有所不同,而且温度高到一定程度,产生的变化相当大。温度误差是霍尔元件测量中不可忽视的误差。
针对温度变化导致内阻(输入、输出电阻)的变化,可以采用对输入或输出电路的电阻进行补偿。对霍尔元件进行温度补偿的方法有很多种:采用恒流源提供控制电流、合理选择负载电阻、采用热敏电阻,也可以将整个霍尔电流传感器进行监测补偿。其中最简单实用的方法就是用热敏电阻对霍尔元件进行温度补偿。
对于由温度系数较大的半导体材料(如锑化铟)制成的霍尔元件,常采用图3所示的温度补偿电路,其中Rt是热敏元件(热电阻或热敏电阻)。本文引用地址:https://www.eepw.com.cn/article/179932.htm
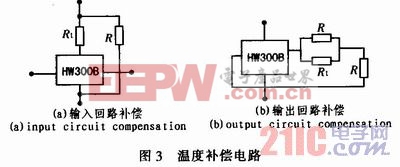
图3(a)是在输入回路进行温度补偿电路,当温度变化时,用Rt的变化来抵消霍尔元件的乘积灵敏度S和输入电阻Ri变化对霍尔输出电势Vk的影响。图3(b)则是在输出回路进行温度补偿的电路,当温度变化时,用Rt的变化来抵消霍尔电势Vk和输出电阻R0变化对负载电阻RL上的电压UL的影响。安装测量电路时,应使热敏元件和霍尔元件的温度一致。
3 测试结果
3.1 连接电路
1)由DF1731SB3A型双路电源提供±18 V电压,经过电压转化芯片输出稳定的±5 V电压,给霍尔电流传感器提供工作电压,分别接传感器P1口的引脚1(GND)、2(+5 V)、3(-5 V)。P2口的引脚1为输出端,引脚3为GND。
2)仔细检查电路,确认无误后上电。霍尔传感器的输出接UNI-TUTS8A型万用表。先调节HW30082、引脚3之间的100 kΩ电位器,使零点电压尽可能地接近0 mV。
3)将待检测通电导线穿过集磁环。采用的方法是在8 Ω的功率电阻上施加电压,如果是交流电压电源TektronixAFG310,则产生交流电;如果是直流电源DF1731SB3A,则产生直流,通过改变电压的大小改变电流的大小。
3.2 线性度的测量
线性度是指输出对于输入的跟踪度的好坏,输出与输入有良好的线性关系。表1为测试数据,在不等位电势为0 mV时,用UNI-T UTS8A型万用表测量的数据。

当电阻两端接交流电压时,由Tektronix AFG310型交流信号源提供电压,输出接TektronixTDS型示波器,改变交流电压幅值的大小,观察示波器上波形幅度的大小。经观察线性度很好。调节AD620的放大倍数,可以使被测电流达到±99.6 A,一般的传感器电流范围为±50 A,因此该传感器的动态测试范围提高了将近50%。

传感器相关文章:传感器工作原理
霍尔传感器相关文章:霍尔传感器工作原理
风速传感器相关文章:风速传感器原理 电流变送器相关文章:电流变送器原理 电流传感器相关文章:电流传感器原理 霍尔传感器相关文章:霍尔传感器原理














评论