高精度无刷直流电机伺服控制系统的设计与仿真

3 系统与上位机的通讯
系统中用SCI接口完成与上位机的通讯功能,采用RS-232接口实现通信。通过上位机可以给定位置量,同时控制过程巾电机的速度、电流、位置反馈量等参数,也可以实时地发送给上位机显示;SPI接口完成串行驱动数码管显示的功能。通过数字I/O扩展的键盘设定位置给定量,并由数码管显示。
4 系统仿真
本文对速度环采用增量式PID控制和参数自整定模糊PID控制两种控制算法,利用北京雅合全公司生产的型号为45ZWN24-25的三相四极无刷直流电动机,对实验结果进行分析。图9、图10分别对应两种算法在电机启动时的转速响应曲线。
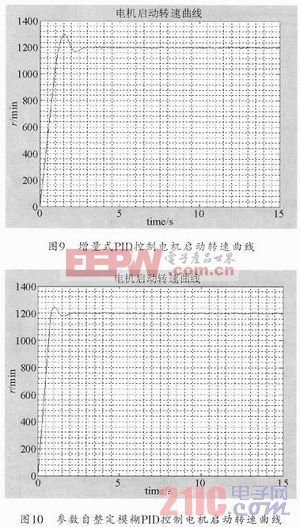
分析电机启动时转速启动曲线可知,两种控制箅法都有一定的超调,增量式PID控制算法电机启动达到稳态的时间大约为2.8s,超调量为8.27%;而参数自整定模糊PID控制算法电机启动达到稳态的时间大约为2.2s,超调量为4.58%,可见,采用参数自整定模糊PID控制算法之后,有效地降低了超调量,缩短了电机启动的时间,提高了电机的控制精度。
5 结束语
本文设计了以TMS320F2812为核心的数字直流伺服系统,很好地解决了高精度伺服控制系统中PWM信号的生成、电机速度反馈及电机电流反馈问题,并实现了保护功能,使系统硬件得到了极大地简化,提高了系统的可靠性。并结合参数自整定模糊PID控制算法实现了电机的高精度伺服控制,实验结果验证了陔方法的有效性。

霍尔传感器相关文章:霍尔传感器工作原理
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理
霍尔传感器相关文章:霍尔传感器原理









评论