基于极点配置的400 Hz 逆变电源系统设计

2 仿真与分析
根据400 Hz 逆变电源的特性, 选择其开关频率为f sw = 20 kHz, 进而确定系统的阻尼振荡角频率为 r= 3 500 rad/ sec, 由于本系统相对应的逆变电源是在空载条件下设计的, 故为工作时加载留一定的裕量, 取 r= 0. 6, 系统的综合等效电阻r = 0. 1 。
滤波器的设计可有多种方法。本文采用一种较为简单的LC 滤波器设计法来确定LC 的参数。由于系统的开关频率远大于基波频率, 滤波器的截止频率一般选为1/ 10~ 1/ 15 倍的开关频率。本文选截止频率为f c= 1 600 Hz 即4 次谐波, 从而根据文献[ 7] 中采用的方法来确定滤波参数: L = 530 !H, C= 11. 9 !F。将以上确定参数代入式( 7) , 可计算出系统的反馈增益。经计算可得400 Hz 逆变电源的参数选取, 与50 Hz 系统相比不易确定, 本文取k1i= 231. 9, k1p = 0. 0776, k2i= 235909, k2p = 24. 4。将以上参数代入式( 5) 并进行MATLAB 仿真可得空载时系统特性如图2~ 图7。
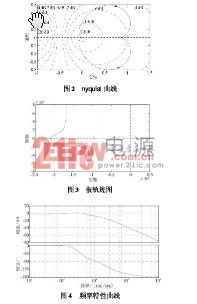
图2 为系统的奈奎斯特曲线, 可以看到, 曲线不包围( - 1, j0) 点, 根据奈奎斯特稳定判据可知系统是稳定的; 图3 为系统的根轨迹图, 可以看到, 一对共轭主导极点位于S 域左半面距虚轴较近处, 对系统特性起主要的影响作用, 非主导极点也位于s 域左半面, 对系统特性的作用较小, 从图中还可以看出, 4 个极点都位于S 域的左半面, 说明系统是稳定的; 图4 为系统的频率特性曲线, 由幅频特性与相频特性可知系统低频段特性平稳, 高频段幅值迅速衰减, 具有很宽的带宽, 在工作频率范围内具有很大的稳定裕度; 图5 为系统的单位阶跃响应, 由图可知系统具有较快的动态特性。
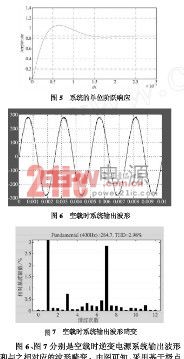
图6、图7 分别是空载时逆变电源系统输出波形和与之相对应的波形畸变。由图可知, 采用基于极点配置的PI 控制大大增强了系统的输出性能, 减小了系统的波形畸变, 空载时系统的THD 值只有2. 98 %,波形的正弦性好。接下来对系统进行加载实验, 由于400 Hz 电源主要用于精密场合, 不作为再整流的交流输入, 故本文仅对系统施加阻性负载和阻感性负载, 仿真结果见表1。
表1 系统加载仿真结果

经过表1 的分析可知, 在加阻性负载的情况下, 系统的畸变率T HD 都小于空载时的THD 值, 电压的变化也在允许范围( 5 %) 以内; 加阻感负载的情况下, 由于电感的存在, 电压畸变率较纯阻性负载时大, 但输出电压的有效值在一个小范围内变化, 基本保持平稳。
可见, 本系统具有较强的带负载能力。
3 结束语
本文以极点配置的方法对一款400 Hz 逆变电源进行了分析计算, 发现400 Hz 逆变电源参数的设计较工频困难, 计算误差、相角偏移等因素对系统性能的影响较大。本文采用了理论计算与仿真验证相结合的方法, 最终确定了系统的相关参数。通过MA TLABSIMULINK模块进行仿真, 验证了该系统动态响应快、稳态误差小和稳定范围大, 逆变电源输出波形畸变小, 带载能力强, 达到了预期的效果。



评论