CPLD 实现 GPIB 控制器的设计

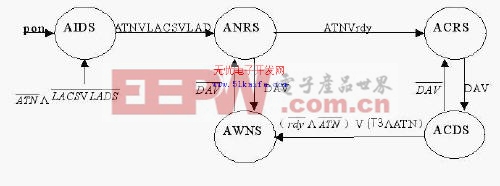
图 1 AH 功能状态图
其状态转换的 VHDL 语言描述如下:
process(c_state,n_state)
begin AIDS='0';ANRS='0';AWNS='0';ACDS='0';ACRS='0'; case c_state is
when s1=>AIDS='1';NRFD='1';NDAC='1';
IF (ATN OR LACS OR LADS)='1' then n_state=s2;
else n_state=s1; end if;
when s2=>ANRS='1';NRFD='0';NDAC='0';
IF ((ATN OR rdy) and not tcs)= '1' then n_state=s3;
elsif DAV='1' then n_state=s5;
else n_state=s2; end if;
when s3=>ACRS='1';NRFD='1';NDAC='0'; IF DAV='1' then n_state=s4;
ELSIF (NOT ATN AND NOT rdy)='1' THEN n_state=s2;
else n_state=s3; end if;
when s4=>ACDS='1';NRFD='0';NDAC='0';
IF ((ATN AND T3) OR (NOT ATN AND NOT rdy))='1' THEN n_state=s5;
else n_state=s4; end if;
when s5=>AWNS='1';NRFD='0';NDAC='1'; IF DAV='0' then n_state=s2;
else n_state=s5; end if;
end case;
end process; 根据仪器的具体要求,由于大多数测试系统只要求被远控,并不要求控功能,而并查功
能在系统组建中属于可选项,很少用到,为了简化系统,设计中彻底去掉此两项功能。其他
功能模块包括:讲者功能(T)、听者功能(L)、源方挂钩功能(SH)、受方挂钩功能(AH)、 服务请求功能(SR)、、远控本控功能(RL)、设备触发功能(DT)和设备清除功能(DC)。
其设计原理与 AH 相同,在这里就不做详细论述。
2.4 辅助命令译码器与多线消息译码器
1.辅助命令译码器通过对辅助命令寄存器 F0 到 F4 位的译码来生成辅助命令。 辅助命令共有 stactic 和 pulse 两种,即静态和脉冲两种信号,静态命令用电平的高低来表示。而动态命令则通过一个周期的方波脉冲信号来产生,要求脉冲命令至少在写完辅助命令 寄存器后保持一个周期。我们通过 VHDL 语言来完成本模块的设计。
2.多线消息是处于相互排斥的编码集中但又公用一组信号线来传递的消息。在母线上,
每一时刻只能传递一条多线消息(一个消息拜特)。多线消息在远地消息译码单元内进行译码。 在这个译码单元,通过消息传递单元(DIO 线)来接收母线上的消息。消息译码单元仅在命令工作方式下(ATN=真)期间起作用。这样的接口消息可能是地址、通令、专令或副令之一。
在数据工作方式(ATN=假)中,数据线上携带器件消息,这时译码单元不起作用。在本 GPIB
控制器设计中,此模块还包含了地址比较器,这样可以得到内部状态机所需的与地址相关的 信号。用 VHDL 语言完成其设计,并例化成模块。










评论