基于飞轮储能的新型动态电压恢复器的研究

由式(4)可知,该数学模型存在交叉耦合项,因而给控制器设计造成一定难度。为此,采用前馈解耦控制策略,当电流调节器采用PI控制器时,则uid和uiq的控制方程如下:
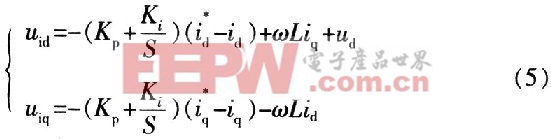
式中,Kp、Ki为电流内环比例系数和积分系数;![]() 为电流指令值。
为电流指令值。
将式(5)代人式(4),并化简得:
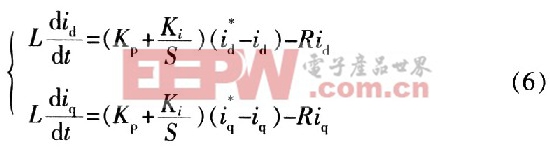
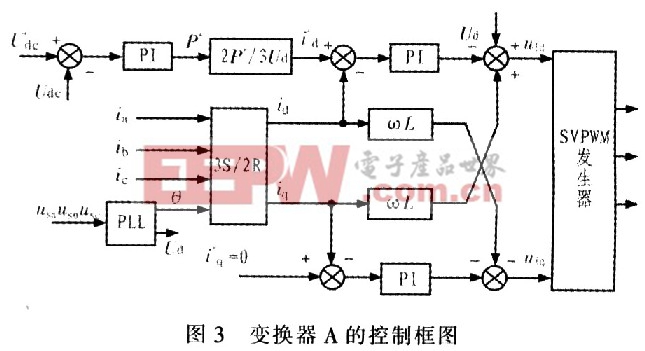
式(6)实现了电流内环的解耦控制。由上述分析可得变换器A的控制框图如图3所示。
3 仿真结果
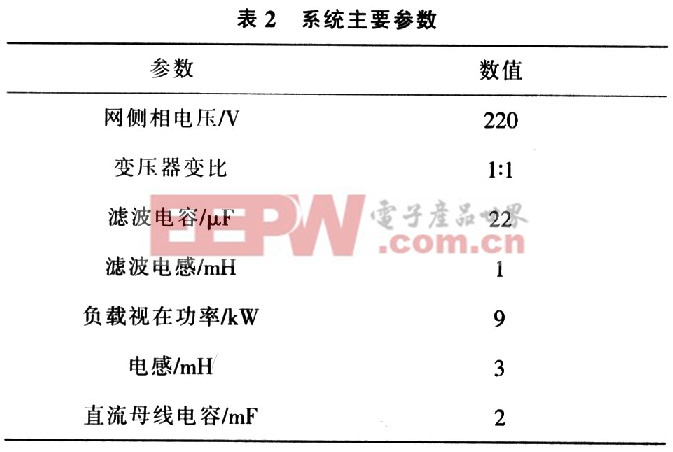
针对提出的拓扑结构和控制策略,利用Matlab/Simulink进行仿真研究。系统主要参数如表2所示。其中,FESA由2台FESU并联组成。
3.1 飞轮充电状态
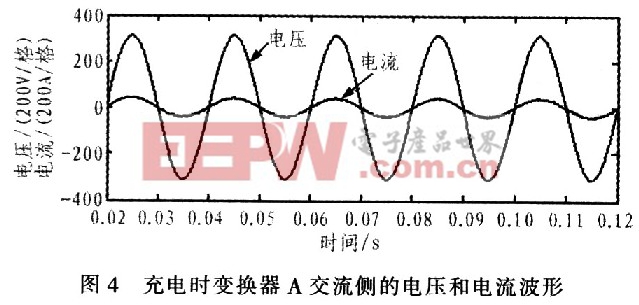
图4是飞轮充电时变换器A交流侧的电压和电流波形,由图4中可以看出电流与电压同相,实现了电流对电压功率因数控制。图5是飞轮充电过程中,电机A相电流波形。相电流波形为方波,在换相过程中,相电流有一定的波动。
3.2 浅度电压暂降补偿状态
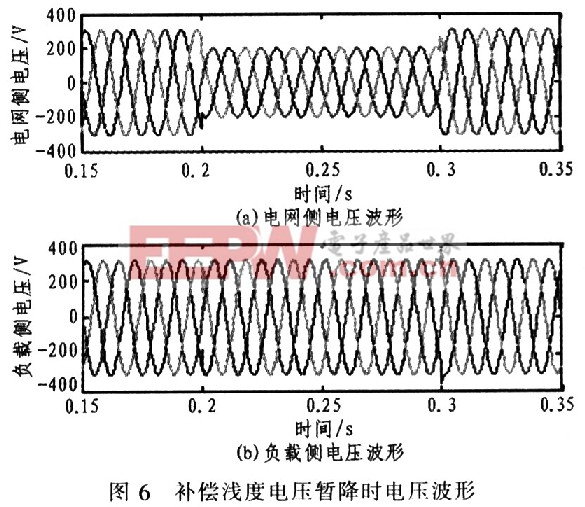
在浅度电压暂降补偿状态时,能量由变换器A提供。图6给出了电压暂降时的动态补偿波形,由图6可以看出系统补偿动态响应速度快,同时具有良好的稳定性和跟踪性能。








评论