基于飞轮储能的新型动态电压恢复器的研究

2.2 飞轮放电控制
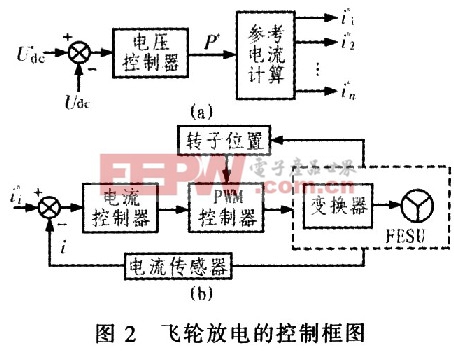
在飞轮放电过程中,电机运行于制动状态,随着转速的降低,电压也随之降低。为了得到恒定的直流母线电压,采用电机回馈制动的半桥调制方式。
各台并联飞轮属于同一规格,电气参数基本一致;前后两次电压暂降间隔足以让所有飞轮转速都上升到额定转速,故功率和储能量相等;为了减少系统损耗,每次放电时投入运行的飞轮个数应尽可能少。飞轮放电控制的关键点是如何计算放电的飞轮台数以及每台飞轮的输出电流指令值。
各台飞轮的充放电次数为:T1≥T2≥…,≥TN,则放电控制策略如下:
1)按照充放电次数由少到多依次给各台飞轮排序,如充放电次数相同,则转速高者序列号小。
2)根据式(1)确定进入放电状态的飞轮台数m。

式中,Pmaxi为i台飞轮的最大输出功率;P*是需要输出的功率指令值。
3)当P*Pmax1,FESU1进入放电状态,其输出电流指令值为:
随着能量的释放,飞轮转速下降,故储能量和输出功率随之减小,当原有投入放电的飞轮不能满足负载需求时,投入放电的飞轮台数以及各台飞轮的输出电流指令值需重新计算。
将之前进入放电状态的飞轮的序列号都增加1,然后返回1)重新计算。当电网电压恢复正常时,投入放电状态的飞轮的充放电次数都增加1。由上述分析可得飞轮放电的控制框图如图2所示。
2.3 DVR变换器的控制
补偿电压的输出需同时实现两个目标:高动态响应速度和高稳定精度。前馈控制可以显著提高系统的动态响应速度,缩短补偿电压发出的时间。反馈控制可以提高系统的稳定裕度。因此,采用由前馈控制、电压瞬时值和滤波电容电流瞬时值反馈控制构成的复合控制策略。
2.4 变换器A的控制
变换器A的控制目的是控制直流母线电压恒定的同时,实现交流侧输入电流的正弦化且与电网电压同相位。
变换器在abe三相静止坐标系下的方程为:
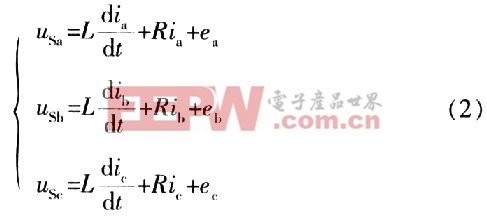
式中,L为与电网相连的滤波电感的电感值,将功率开关管损耗等效电阻同滤波电感等效电阻合并为R,usa、usb、usc为电网三相电压,ia、ib、ic为变换器交流侧三相电流,ea、eb、ec为变换器输出的三相电压。
通过坐标变换将该数学模型转换至同步旋转坐标系中,变换器在同步旋转坐标系下的数学模型为:
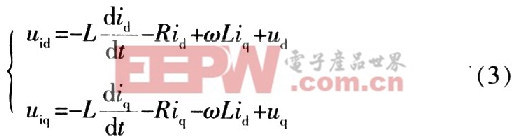
式中,ud、uq为三相电网电压在同步旋转坐标系下的投影;id、iq为变换器交流侧三相电流在同步旋转坐标系下的投影。
选取同步旋转坐标系的d轴与电网a相电压矢量重合,则uq=O,式(3)可进一步简化为:
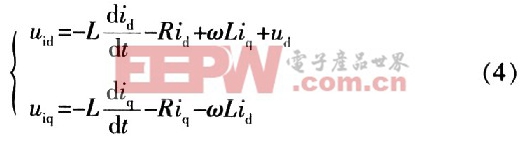
这说明当电网电压稳定时,控制了变换器d轴电流即控制了输入的有功功率;控制了变换器q轴电流即控制了输入的无功功率。若要实现单位功率因数控制,即输入的无功功率为零,只要令变换器q轴电流设定值![]() 即可。
即可。








评论