基于模糊优化的PID直流无刷电机控制

为了实现实时和高准确率的控制从而提高直流无刷电动机的输出性能,下面我们将来设计一种模糊PID控制器来调节PID控制器的增益参数。
2.1 PID控制
连续PID控制的数学表达式

式中,e(t)为系统输入和输出的差值,u(t)为由PID控制器产生的控制信号,Kp为比例增益,T1为积分时间常数,TD为微分时间常数。
离散PID控制的数学表达式

式中,KI=KPT/TI,KD=KPTD/T,T为采样周期;KP,KI和KD为3个可调节的参数。PID控制器的任务便是决定这些参数的值。
2.2 模糊PID控制器
图2所示是一个典型的模糊PID控制器的结构图,图中nr为给定电动机的转速,n表示实际电动机的转速,e为系统误差,ec为e的微分值。当电动机工作时,在每个采样周期,通过模糊控制指令,模糊推理机制便检测e和ec的变化率,从而分别产生它们的模糊变量E和Ec。然后,该控制器将会即时对PID控制器原有的KP,KI和KD三个参数进行调节,从而使得PID控制器总是能够对直流无刷电动机产生最优控制信号。本文引用地址:https://www.eepw.com.cn/article/162874.htm
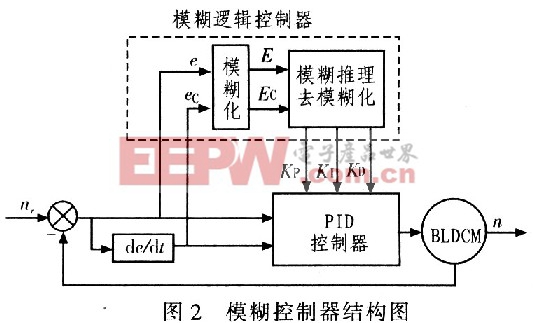
在该系统中,KPf,KIf和KDf表示KP,KI和KD逻辑变量的增量。根据E(k)和Ec(k)的值,它们的模糊语性值E和Ec如表1所示。

模糊控制规则是专家的经验和操作者的技能加以总结而得出的模糊条件语句的集合。在本文模糊PID控制方法中,模糊库用以下49条模糊语句描述: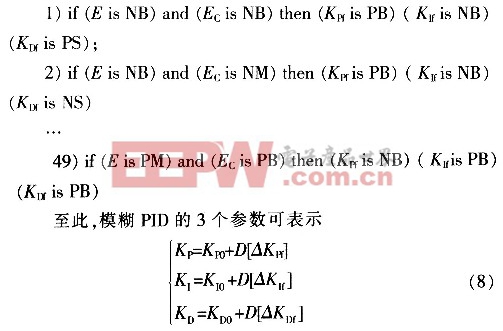
式中,KP0,KI0和KD0为原始的PID控制器参数,一般由Ziegler-Nichols调试方程给出。D[x]为去模糊过程。
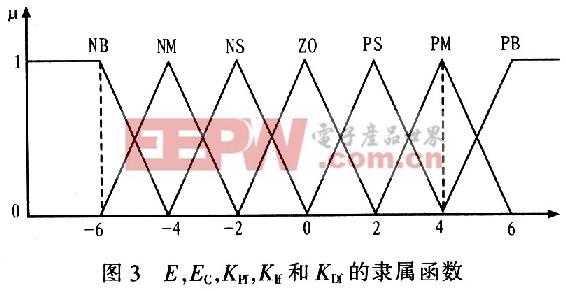
E,Ec,KPf,KIf和KDf的模糊逻辑全部定义为:{NB,NM,NS,ZO,PS,PM,PB},分别代表:大负、中负、小负、零、小正、中正、大正。另外,这些变量的论域全部被定义在-6到+6的整数区域,隶属函数为三角形函数,如图3所示。






评论