UWB的无线传感器网络的定位技术

4 仿真分析
对测得的多径环境下的UWB接收信号方法的测距精度进行验证,并结合节点定位技术,对节点进行定位。Er,Tr和a的隶属函数如图2所示。
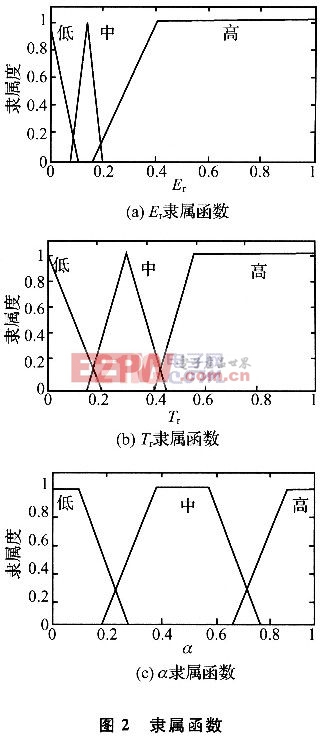
取发射信号时刻T0=0,在接收端分别记录下首次到达信号时刻Tf,幅度最强信号的到达时刻Ts,首次到达信号幅度Ef和幅度最强信号的幅度Es。分别计算出模糊逻辑的输入值Er、Ts,根据隶属函数,可以得到a。将Tf、Ts、a代入(3)式即可得到直达信号到达时刻T,进而结合(4)式计算出两点之间的距离。
假设有三个参考节点(0,0)、(10,0)、(10,10),盲节点到参考节点的实际距离分别为6.20、2.88、9.46,利用三边测量法可以获得节点的位置,如表2所列。

这里,定义节点定位误差为节点的真实位置与估计位置的欧几里得距离。从表中可以看出,在节点定位中,应用基于UWB的测距技术可极大地提高节点定位精度。












评论