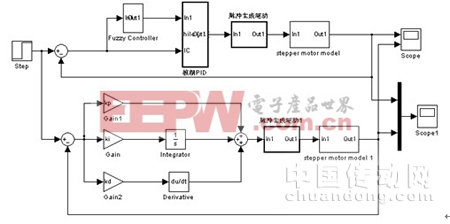
步进电机位移的模糊PID控制设计方案

模糊推理和解模糊也很重要,解模糊是根据模糊推理的结果,绘出控制量的过程,常用的方法有最大隶属度法 中位数法 加权平均法,最大隶属度具有梯形中断性不利于系统的稳定,而加权平均法有益于系统稳定,所以本文采用加权推理..
本文引用地址:https://www.eepw.com.cn/article/162667.htm
模糊控制器具有良好的动态特性,但是静态特性不能获得满意,而PID控制具有较高的稳态静态精度,。把PID控制引入模糊控制器中,大范围误差范围内采用模糊控制,在小范围误差换成PID控制,两者的转换由预先设置的程序控制根据误差范围自动实现。
4 仿真结果分析

-- pagebreak -->在给定位置输入同样为10rad的情况下,图4最终也达到了要求,但是中间出了较大的抖动,而采用了模糊PID控制后,从图5可以看出系统响应更加迅速,并且超调量很小,过程的稳定性也大大的提高。说明采用模糊PID控制达到了控制系统的基本要求,比起单纯的PID控制确实具有优越性。
5 结束语
通过步进电机建模得到,步进电机是复杂的高度非线性系统,而本文的模糊PID控制系统,比普通的PID控制有了很大的提高,但是由于步进电机最大启动转速 的存在,造成易于失步和震荡,为了尽可能保持稳定性和的启动和停止时间,可以采用模糊自整定技术,通过改变KP的值,可以将步进电机直接启动速度和停转速度设置为一个小于 的值,这样系统的响应速度可以进一步提高。
参考文献
1 史敬灼. 步进电动机伺服控制技术[M ] 北京:科学出版社, 2006.
2 李庆春 一种PID 模糊控制器( fuzzy PI + fuzzy ID 型) 控制与决策 2009 年7 月第24 卷第7 期
3 刘卫国, 宋受俊三相反应式步进电动机建模及常用控制方法仿真微电机2007年第40卷 第8期(总第164期)
4 谢仕宏MATLAB R2008控制系统动态仿真实例教程(MATLAB应用丛书) 化学工业出版社2009年1月
5 王晓明 电动机的单片机控制 北京航空航天大学出版社2008 年06月
6 王宗培 步进电动机及其控制系统[M ]. 哈尔滨: 哈尔滨工业大学出版社, 1984








评论