基于AVR单片机的灭火机器人设计与实现

摘要:根据灭火机器人的竞赛规则,给出了灭火机器人的硬件结构设计方案和软件设计流程。所用的机器人处理器为AVR单片机,主要利用红外传感器、光敏传感器对环境进行检测,使机器人在场地中按照预定的方案寻找火源并扑灭。
本文引用地址:https://www.eepw.com.cn/article/162619.htm关键词:灭火机器人;传感器;ATmega32
1 引言
机器人竞赛是近年来迅速开展起来的一种对抗活动,它涉及人工智能、机械、电子、传感器、精密机械等诸多领域。通过竞赛可以培养学生的创新意识、动手能力、团队写作能力等。其中灭火比赛是开展范围最广、影响最大的机器人竞赛项目之一。
比赛规则为模仿生活中消防员灭火,机器人从H点出发,在四个房间内寻找任意摆放的蜡烛,并且设法将其灭掉。比赛场地的墙壁高33cm,材质为木板,颜色为黑色。尺寸如图1所示。对于比赛,得的分越低成绩越好。另外根据选择的模式不同,计分时要乘上相应的系数。
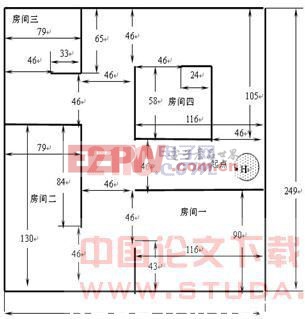
图1比赛场地平面结构
2 系统硬件设计
2.1 系统总体设计
系统以ATmega32单片机为核心,它是一种基于增强RISC结构的、低功耗的8位单片机。其特点为:①片内具有32K字节的可编程Flash;2K字节的片内SRAM数据存储器;1024个字节片内在线可编程EEPROM数据存储器。②片内含JTAG接口。③外围接口。两个带有分别独立、可设置预分频器的8位定时器/计数器;一个16位定时器/计数器;四个通道的PWM输出;8路10位ADC;32个可编程的I/O口。④低功耗,最高工作频率为16MHz。












评论