高精度激光直写数字伺服滤波器的设计

2.2 参数调节
在位置PID调节器中比例增益Kp的大小决定系统的快速性,积分增益Ki的作用是消除系统的静态误差。微分增益Kd的作用是增加阻尼,减少振荡。调节过程是先调节Kp,再调节Ki,然后调节Kd。第1次设定Ki增益时,如果把Ki设定为一非O值将引起突然的“跳跃”。为避免这种情况,需要把积分限(积分部分的饱和控制器)设置为0,Ki设定为期望值,再设置积分限到期望的积分限。这样就清除了所有以前的积分值,从而使积分从前一个点开始平稳运算。接着调节Kvff,Kaff,从而提高系统的稳态精度。最后调节Kf,从而克服摩擦力的影响。
在启动阶段调节Kvff,Kaff过大会使速度过快而导致位置过冲。在减速阶段调节Kvff,Kaff过小,会使定位时间过长。根据最优控制思想,如果系统按照最大加速度启动,最大速度运动,最大减速度制动,就可以以最短时间无超调地达到协调点。因此,参数调节时应按照启动,匀速,减速3个阶段分别设置。
3 MATLAB设计与仿真
3.1 仿真模块设计
根据设计原理,图l中的偏差计数模块就等效为带前馈补偿的PID控制器,并设计成图2中所对应的部分,并且将D/A转换器等效设计成离散的数据通过零阶保持器;将安川伺服驱动器等效速度环和电流环;输出的信号采用仿真示波器进行观察。因此整个伺服三环PID仿真原理如图3所示。本文引用地址:https://www.eepw.com.cn/article/162570.htm
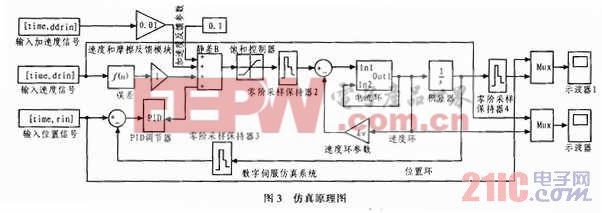
其中,rin(k)为采样K时刻的位置输入信号,为了能模拟实际的效果,将输入的rin(k)设置为不规则的位置信号,此时输入指令为正弦叠加信号;drin(k)为采样K时刻的速度输入信号;ddrin(k)为采样K时刻的加速度输入信号,并且drin(k+1)=(rin(k+1)-rin(k))/ts,ddrin(k+1)=(drin(k+1)-drin(k))/ts。
3.2 仿真波形
对于高精度的激光直写,衡量其性能主要取决于速度的稳定、响应度和位置的精确。因此在图3的仿真中,要根据实际情况,多次调节控制系统参数,并经过分析和对比,从中得到一幅速度稳定、位置精确的跟踪图,其仿真波形如图4所示。
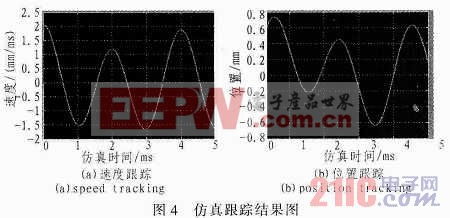
图4(a)为速度跟踪结果,设置的速度和实际的速度重合,速度稳定,稳定控制在0.1%内。在0时刻附近出现了速度突然的“跳跃”,是由于没有调节积分限。因此在实际情况中应先把积分限(饱和控制器)设置为O,Ki设定为期望值,再设置积分限到期望的积分限。
图4(b)为位置跟踪结果,输出的实际位置和设置的目标位置重合。位置定位精确高,精度控制在0.1%内。
仿真结果表明在带有摩擦条件下,位置跟踪没有存在“平顶”现象,速度跟踪没有存在“死区”现象。位置跟踪定位精度高,速度跟踪稳态精度高。
4 软件实现
伺服单元模块由伺服驱动器设计,其参数调节可以在伺服驱动器中设置,详细参考驱动器用户手册。PID数字滤波器+前馈复合控制系统由DSP2812实现。操作流程为:先将PID复合仿真模块的MATLAB语言生成CCS中的C语言,然后移植到CCS软件中,并根据PID控制算式原理结合软件设计流程进行修改。
5 结论
介绍了伺服控制系统结构,针对系统中存在的摩擦环节和实际要求进行分析,然后结合根据控制原理,设计了伺服PID数字滤波器。通过MATLAB仿真验证该数字滤波器速度稳定;位置跟踪误差收敛于零。并从中得到了关于调节控制参数的经验。最终的实际结果表明,整个系统输入与输出时差小于100 Ls;无噪音无振荡;定位精度误差控制±1μm范围内。

伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理







评论