高精度激光直写数字伺服滤波器的设计

激光直写技术是一种近年来应用广泛的超精密加工技术。该技术是一种利用强度可变的激光束,在基片表面实施有规则的高精度扫描。在扫描过程中,光刻基片随载物平台而运动。因此影响光刻元件的质量取决于载物平台的定位精度以及运动的稳定性,影响光刻元件的快速性取决于系统的响应度。
基于数字式伺服的运动控制器是超精密定位系统的关键。由于数字伺服滤波器是数字式伺服的运动控制器的核心,从而数字伺服滤波器的设计将影响系统的定位精度。
数字伺服滤波器是指系统的闭环控制与调节采用数字技术,所有控制调节实现软件化。调节器的全部软件化使控制理论中很多控制思想和手段得以应用。同时利用软件很容易完成参数的自由化和故障的自诊断功能,使系统控制性能大大提高,从而克服了模拟型闭环伺服系统对微弱信号的信噪难分离、控制精度难提高、容易受机械摩擦和温度影响,位置环控制产生零点漂移误差等缺点。
1 伺服控制系统结构及分析
1.1 伺服控制系统结构
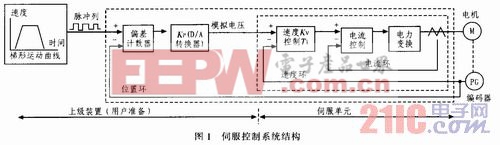
整个伺服控制系统的硬件结构如图1所示。上级装置由DSP处理器和D/A转换模块组成,伺服单元由安川伺服驱动器组成。整个系统是一个闭环伺服电机控制系统。DSP处理器产生梯形运动曲线的数字脉冲信号,通过设计的数字滤波器,直接驱动D/A转换器产生模拟电压,经过伺服单元驱动伺服电机。实际运动中的位置和速度信号由电机反馈给光编码器,并由光电编码器产生数字信号,然后传输给DSP进行采集处理。
1.2 系统分析
该方案的关键是解决电机轴与负载之间的粘性摩擦和外界对电机及变换器的干扰等问题。由于摩擦环和外界干扰的存在,系统的动态及静态性能受到很大程度的影响,主要表现为低速时出现爬行现象,稳态时有较大的静差或出现极限环振荡。为了满足激光直写的要求,系统还必须具有响应速度快、定位时间短,稳态精度高等特点。若启动速度过慢或过冲,停止时间过长,系统则具有很强的振荡,且噪声大。
2 数字滤波器的设计
2.1 数字伺服滤波器模型设计
通过大量实验,对系统进行分析后发现:对位置偏差控制采用PID控制方法可以提高精度和阶跃响应;加入速度和加速度前馈补偿控制方法可以提高系统的稳态精度;加入摩擦补偿可以克服摩擦力的影响。因此,此方案没计是一种既利用位置误差进行闭环控制,又利用给定位置信号进行开环的复合控制系统。
则系统控制输出U(t)=Up(t)+Uva(t)+Uf(t),其中Up(t)为PID控制器,Uva(t)为速度和加速度补偿控制器,Uf(t)为摩擦补偿控制器。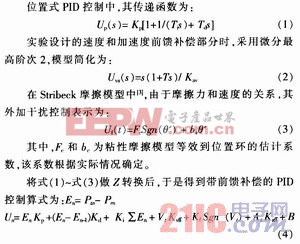
PID伺服滤波器控制规律如图2所示。
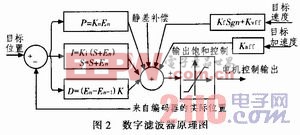
图2中Kp为比例增益,Ki为积分增益,Kd为微分增益,Kvff为速度前馈增益,Kaff为加速前馈增益,Kf为粘性摩擦系数,En为位置偏差,Vt为t时刻速度,At为t时刻的加速度,输出的B静态误差主要用于补偿控制轴受重力的影响。对滤波器输出对应的模拟量,由输出的饱和控制器进行限制。

伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理







评论