异步电机直接转矩控制的ISR方法研究

磁链调节具体的控制策略为:磁链的计算值与给定值进行比较,若pi输出大于零,则令hψ=1此时需要增大定子磁链,直到pi输出为零,当pi输出小于零,则令hψ=-1,此时需要减小磁链直至pi输出为零。同理,转矩的计算值与给定值进行比较,对于转矩调节,若pi输出大于零,则令hte=1此时需要增大电磁转矩,直到pi输出为零,当pi输出小于零,则令hte=-1,此时需要减小磁链直至pi输出为零。
在matlab的具体实现如图8所示,转矩调节器与磁链调节器结构相同。
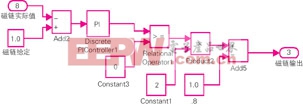
图8 matlab中磁链调解器
5 仿真波形对比与分析
对异步电动机直接转矩bang-bang控制与pi控制进行matlab仿真比较。在相同的采样步长下,控制过程转矩变化如图9所示,电机先以最大转矩达到设定转速,然后稳定。在pi控制与bang-bang控制对比中我们很清楚的看到pi控制的转矩脉动要比bang-bang控制平滑的多,如图10所示。
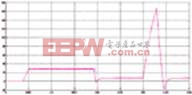
图9 异步电机直接转矩控制的转矩波形

图10 bang-bang控制与pi控制转矩波形放大图
从图11的转速响应曲线来看,转速由10rad/s到20rad/s用时5ms,表明该系统具有良好的动静态特性。
从图12(a)与图12(b)我们可以看出,基于pi控制的电流曲线要比基于bang-bang控制的电流曲线平滑的多,这说明pi控制不仅在转矩控制上而且在电流上也优于滞环控制。

图11 异步电机直接转矩控制转速响应曲线

图12(a) pi控制的电流曲线

图12(b) bang-bang控制的电流曲线
6 结束语
在系统处于空载时,采用pi调节器代替bang-bang滞环控制器能有效地减小直接转矩控制方案中转矩脉动,有效地抑制了电流谐波,具有良好的低速性能及动静态特性,便于数字实现,使直接转矩控制性能有了很大改善。本文引用地址:https://www.eepw.com.cn/article/162503.htm

逆变器相关文章:逆变器原理
逆变器相关文章:逆变器工作原理





评论