基于DSP的无位置传感器永磁同步电机磁场定向控制系统

3 无传感器算法
3.1 减少一路电流传感器方法
在逆变器控制中都需要相电流信息,传统采用的方法是直接用传感器获得需要的相电流,这种方法依赖负载的布置,并且至少需要两个传感器直接应用于电机组绕组。本文介绍的方法是仅通过采集直流侧母线电流信息,来估计交流侧三相电流值。因为逆变器开关状态是我们直接控制的,所以已知输入电流的路径,即输入线电流和电机相电流间的关系。这样在通常八个开关状态(Sa,Sb,Sc)中除(0,0,0)和(1,1,1),在其他六个开关状态下,直流侧线电流信息总对应a,b,c中某一路相电流值。本文引用地址:https://www.eepw.com.cn/article/162496.htm
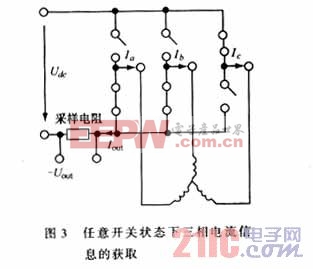
在图3所示的开关状态(Sa,Sb,Sc)=(0,0,1)下,相电流ic等于直流线电流,另外两相电流ia,ib则等于直流线电流的一半。这样线电流信号经一路AD通道,送给DSP,再经过适当计算即可获三相电流信息[4]。
3.2 无位置传感器算法
为了获取低转速甚至零转速下的优良转矩控制性能,也为了提高系统的效率、可靠性、机械强度,降低成本,需要取消位置传感器。此时必要的位置、速度信息可以通过滑模观测器来获取。该方法具有较强的鲁棒性且易于实现。
观测器是一个依赖系统结构和参数的数学模型,通过DSP软件编程来实现。模型通过获取估计值和测量实际值之差来纠正模型,使两者之间差值消失。如估计电流和实测定子电流i之差,带入符号函数sign( ),再乘以常系数K,之后用自适应滤波器补偿数字滤波器的相移影响,这样的输出结果即是转子位置角的正余弦函数。
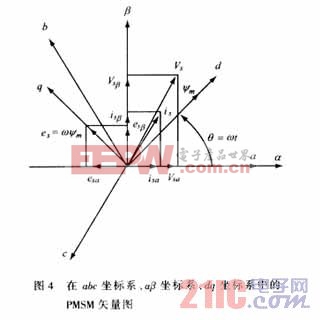
图4为PMSM主要变量:Vs、is、es、Ψ以综合矢量和其分量的形式在静止αβ坐标系,和旋转dq坐标系中的表示。式(7)为PMSM的数学模型:
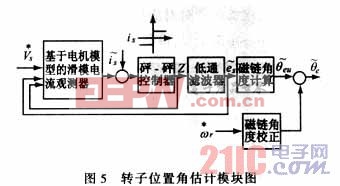
转角观测器模块是基于滑模电流观测器实现的转子磁链估计。模块的主要部分为滑模电流观测器,输出砰砰控制变量Z,Z经过低通滤波得到反电势估值,通过对分量的计算可得到转角












评论