多通道舵机控制器设计

其中脉冲宽度从O.6~2.4 ms,相对应舵盘的位置为-90°~+90°,呈线性变化,如图3所示。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。
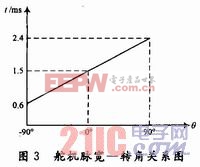
舵机内部有一个基准电路,产生周期20 ms,宽度1.5 ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。由此可见,舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的驱动当中。例如机器人的关节、飞机的舵面以及无人驾驶汽车的方向盘和油门等。
2 用定时器实现多路舵机PWM控制信号输出
对一个机器人关节的控制仅需要一个舵机就可以了,但在机器人、无人机等系统的控制过程中,需要同时实现对多个舵机的控制,也就是说,需要多路PWM信号来完成控制任务。如图1所示,单路舵机信号在20 ms周期内,考虑保护时隙,t的最大取值为2.5 ms,则20 ms内最多可以周期性地输出8路控制信号(20/2.5=8)。若使用微处理器的定时器来实现的话,每个定时器可以控制8路输出,N个定时器则可以输出8N个通道。
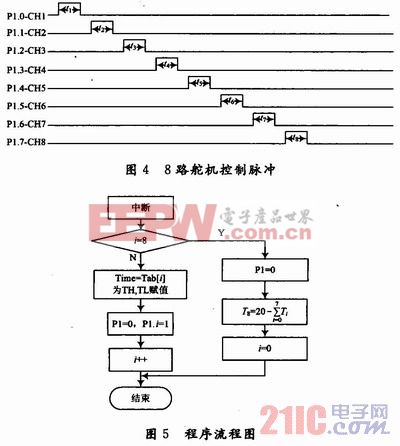
本文所设计的舵机控制器若以MSC-51单片机为核心,使用12 MHz的晶振,它的时间周期就是1/12μs,而它的一个机器周期则是12×(1/12)=1μs。如果舵机的有效行程为(°)/10μs,其控制的角度定时精度是可以达到1μs,约0.1°,因此,任意类型的单片机都能够满足舵机的控制精度要求。利用单片机的串行通信口可以实现与上位的PC机的通信,进而实现多路舵机的同步控制。以AT89C52为例说明该方法的实现过程,设单片机的P1.O~P1.7端口为控制输出,8路舵机控制脉冲如图4所示。
 三相异步电动机相关文章:三相异步电动机原理
三相异步电动机相关文章:三相异步电动机原理









评论