基于磁阻传感器的低功耗方向指示系统

2.2 重难点分析
本设计的重要部分在于信号调理单元。由于磁阻传感器的输出信号极小,只有1 到2 个mV ,需放大电路对来自传感器的信号进行放大处理,为系统提供高精度的模拟输入信号,它所放大的信号对系统的精度起着关键作用。因此,我们在放大增益的设定,参考电压的选取,滤波设计,供电的稳定及电源纹波的处理等方面做了大量的工作,有效提高了方向指示系统的精度。我们将在后文中对这些工作加以详细的阐述。
本设计的难点是磁阻传感器的输出信号太小,外界干扰、电源纹波、桥臂失衡等许多因素都会造成方向指示系统的精度降低,为此我们从理论分析论证和实际电路调试两方面对系统的设计进行优化[。Ina332 仪表运放的选用可以有效地抑制传感器输出的共模信号,减小低温飘和零飘干扰。其体积小、成本低、功耗小的特点也十分符合我们的设计初衷。硬件系统设计的难点就在于运放电路的设计,因微弱信号的放大是其主要功能。稳定的电源系统是整体电路工作正常的基础,特别是模拟信号部分电源更是要求纹波频率低、幅度小,以保证传感器激励和运放工作的要求。
2.3 理论分析计算
2.3.1 磁阻传感器
HMC1052磁阻传感器由两个AMR 传感器(各向异性磁阻传感器) 整合在一起,可以把任何水平方向的磁场分解为X , Y 两个方向的矢量。其工作原理如图4 所示 。
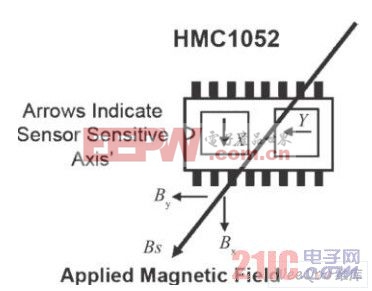
图4 磁阻传感器HMC1052 结构图。
对每个AMR 传感器来说,其原理是当各个磁阻传感器感应到的磁场发生变化时,通用的电磁物质会在外部磁场中改变它的电阻系数,从而改变其阻值,因此阻抗式惠斯通电桥会输出一定的电压信号。每个电桥由四个阻值相同但磁性反相的磁阻元件组成。
双轴罗盘系统的基本原理是使两个传感器电桥元件平行于地平面(垂直于重力场) ,并测量由此产生的X 和Y 的模拟输出电压。当放大的传感器电桥电压几乎同时转换成(被测为) 等量数字信号时,就可计算出Y/ X 的反正切, 从而得到与X 轴测量方向相关的方位信息。
AMR 传感器的输出电压通过测量Out + 到Out - 之间的电压得出,它是传感器灵敏方程的函数,即:

其中: S 为灵敏度(mV/ V Gauss) ;V b 为电桥输入电压(V) ;Bs 为电桥感应强度( Gauss)。
在本系统中V b = 电源电压= 313 V ,Bs = 地磁场强度= 0155 Gauss (公认值) , HMC1052 的灵敏度S = 110 mV/ V Gauss , 可得到传感器输出电压为:
![]()
2.3.2 放大倍数分析与计算
INA332 是Rail - Rail 输出、低功率CMOS 仪表放大器,可单电源工作。INA332 系列产品提供微功率、低价格、低噪声仪表放大器,其特性是低功率电池和多路技术应用的最佳选择。INA332 具有宽带宽和高转换速率,可理想地应用于驱动取样模一数转换器,也可当作通用型仪表放大器使用。图5 是其内部结构图。
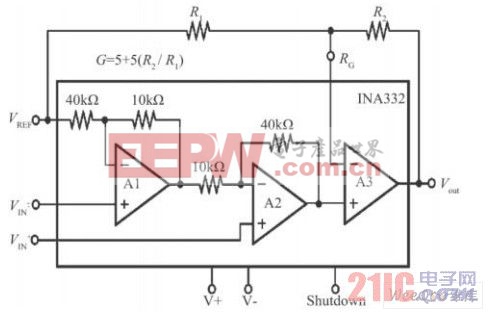
图5 仪表放大器INA332 结构图。
由于噪声的不可避免,必将造成理论分析与实际结果的一定误差。为达到项目规划的3°方向精度目标,这里将该指标要求提高后带入分析。分析如下:
将0°~90°范围内的电压输出N 等分,则当输出值有一个最小分度的变化时,其造成的角度变化应小于精度指标,这里设为1°。而该变化导致输出角度变化最大应在45°附近。经分析N = 200 时,角度最大变化量= arctan ( (100 + 1) / (100 - 1) ) - 45°= 015°,符合要求。
经测试,MSP430 内部的12ADC 可靠的位数约为10bit ,为获得较大电压检测范围,选择内部参考源215 V ,则可靠分辨力= 215 V/ 2^10 = 215 mV。
对于传感器任一轴放大后的输出,其变化范围应是2 N (0~180°) ,则得到放大后的电压范围是215 mV ·2 N = 1000 mV。
则由传感器输出11815 mv 得放大倍数为1000/ 11815 = 550。
因此合理的放大倍数范围可以是400~600 倍。
2.3.3 噪声分析与计算
噪声来源 线性稳压电源。
噪声形式 频率为10 kHz 级的纹波。
噪声参数 表1 为传感器HMC1052 和仪表运放INA332 的噪声参数(单位:nV/ √Hz)。












评论