基于多传感器数据融合的火灾预警系统

3.2 D-S证据理论数据融合方法在多传感器火灾早期探测上的应用
多传感器数据融合的实质是在同一鉴别框架下,利用Dempster合并规则将各个证据体合并成一个新的证据体,而产生的新的证据体就表示了融合所得的信息,然后根据决策规则进行决策。用D-S理论实现多传感器数据融合方法见图3。本文引用地址:https://www.eepw.com.cn/article/162334.htm

在多传感器数据融合系统中,首先初始给一次基本可信度的分配。然后,每当收到一次传感器的信息,就进行一次基本可信度的分配,随着信息的不断传回,再不断地对基本可信度进行分配。最后,依据决策规则得出决策结果。本系统探测的3个对象,根据探测值不同,对断定是否发生火灾的可信度值也不同。表2中对各个探测对象在不同范围内的值,赋予了不同的信任值,这些信任值不是精确得到的概率值,而是由经验和我校实验室火灾统计数据得到的。
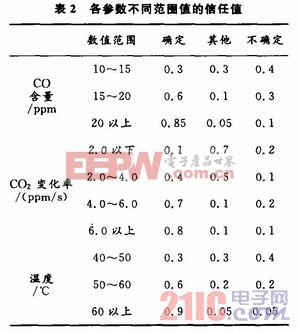
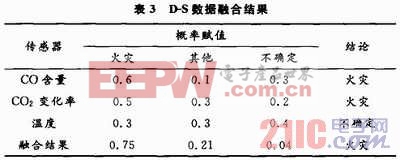
当CO浓度超过10 ppm时,确定发生火灾的概率较小;当超出20 ppm时,确定为火灾的准确率可高达85%。从我校实验室CO2监测数据来看,即使浓度高达1 500 ppm以上,也有可能是房间人数突然增多导致的,所以只从CO2的含量探测数值来断定火灾,会有很大误差。但根据图1的结果得知,火灾发生时CO2含量是一直在递增的,且在火灾初始成长期间,曲线斜率(即增长速度)的变化范围是2.5~6.5 ppm/s,因此本系统将CO2的变化率作为数据融合对象。同样,随着温度值变高,能断定是火灾的概率也越大。以CO含量为15~20ppm,CO2变化率是2.0~4.0 ppm/s,温度为40~50℃这个情况为例,用D-S方法进行数据融合,从表3可以看出,不确定性的概率下降到了可以忽略的程度,即系统的不确定性明显降低;并且原来的单个传感器不能准确判定是否发生火灾,融合后正确判断的概率增大,即对来自3个不同传感器的数据融合提高了系统的判别火灾能力。
4 结语
传感器在采集信息过程中受多种因素的影响,不确定性是普遍存在的。Dempster-Sharer合并规则较好地解决了这种不确定性问题,将多个传感器获得的信息准确地合成为对目标(是否火灾)判定的一致性,增加了系统的正确决策能力。但是,这种方法的使用仍然存在一些局限性。即每一传感器对目标判决的概率赋值,需要依靠经验和数据积累不断进行更准确的设置。












评论