实时控制系统接口设计

2.1 “引导”和“允许手控”控制信号的建立和清除
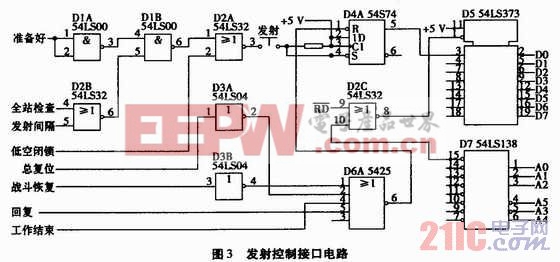
图1中,D6、D7(54LS373)分别为输入、输出接口芯片,构成控制接口电路与计算机的输入、输出通道。136接收并锁存标志系统状态的开关信号,供计算机实时读取,以控制系统进入相应的工作状态;D7则输出系统的状态信息给控制接口电路。
系统设定开机的初始状态为引导状态,此时D7的输出状态量“引导断开”信号为低电平,从而保证了无论手轮拉出或推入都会在D3A(54LS00)的输出端形成“引导”状态量送往计算机,只是当手轮拉出时,微动开关K1断开,K1的2点被电阻R5拉成低电平,故没有“允许手控”信号形成,只有当手轮推入时,微动开关K1闭合,“允许手控”信号形成,并通过D6送往主机,并通过付机通知跟踪组合可随时控制系统进入跟踪状态。
手轮推入为“允许手控”信号的建立时刻,它的建立不应清除先前建立的“引导”信号,即此时系统仍工作在“引导”状态。
当输出接口芯片D7(54LS373)的输出状态量“引导断开”信号变高时,说明跟踪组合已进入了跟踪状态,此时D3A(54LS00)的输出端变低,即“引导”信号被清除,使系统脱离“引导”状态。
在“跟踪”状态下再次进入“引导”状态时,只需将手轮拉出,这时,送入计算机的“引导”信号变高,从而控制系统再次进入“引导”状态。
2.2 引导控制脉冲的产生
在引导状态下,转动ε、R、β引导手轮(图中只画出了ε平面),便可实现对天线的位置控制。引导手轮转动时,带动减速机构和各自的光电码盘转动,光电码盘输出的光电脉冲,经整形电路、方向判别电路的处理,完成对光电脉冲的整形和方向的判别,即当手轮正转时,输出正转脉冲,反转时输出反转脉冲。ε、R、β三个平面的正、反转脉冲分别送到可编程接口芯片8253,8253是一种通用的计数器/定时器,它具有三个功能完全相同的计数器和一个控制寄存器。所以译码器D9(54LS138)需分配四个口地址给一片8253芯片。三个引导手轮产生的六路脉冲分别送到两片8253的六个计数器的输入端(图中只画出了ε平面即一片8253),系统初始化时,计算机通过程序将8253置为外部事件计数器,并给每个计数器赋以计数初值,工作时,六个计数器分别对六路脉冲进行递减计数,计算机用闩锁操作的方式读人正在计数状态的计数值,形成ε、R、β平面坐标位置的控制量。
2.3 “搜索”控制信号的建立和清除
系统在引导状态,可用“搜索”的方式控制天线发现目标。由图1可见,搜索状态量的建立是通过按钮S1和触发器D1A(54S74)完成的,54S74是两个独立的正沿触发的D型触发器,每个触发器都有独立的直接置位、直接复位的功能。为了信号的可靠传输,我们将54S74接成直接置位、直接复位的工作方式,它的输入端接收开关或按钮的动作,当置位条件满足时,其输出端便建立起相应的状态量,并通过接口芯片D6(54LS373)送入计算机,从而控制天线进行搜索。D1A(54S74)的复位端(第1脚)接有由或非门D2A(54LS25)构成的状态量清除电路,当系统“复位”时,或按下“搜索停止”时,均可使触发器D1A(54S74)复位,以清除先前建立的“搜索”状态量。
3 跟踪控制接口电路设计
3.1 跟踪控制信号的建立和清除
系统在引导状态下,当雷达天线发现目标后,可分别将引导组合的ε、R、β引导手轮推入,产生三个平面的“允许手控”指令,经由主机、付机从而控制天线进入跟踪状态。在跟踪状态,ε、R、β三个平面均有“手控”“自动”、“天线自动”三种工作方式,其跟踪精度依次而高。图2为ε平面跟踪控制电路图。由图可见,“允许手控”、“手控”、“自动”、“天线自动”这四个控制信号组成一个有序的状态量链条,它们的建立必须依从以下的顺序依次建立,而不能超越。
允许手控→手控→自动→天线自动.
其中,“允许手控”是基础,当将引导手轮拉出时,上述链条立即失效,系统又回到引导状态。本文引用地址:https://www.eepw.com.cn/article/162179.htm
由图2可见,当按下“手控”按钮S1时,可建立“手控”控制信号,控制系统由“引导”状态进入“手控”状态,或由“自动”、“天线自动”状态回到“手控”状态。

伺服电机相关文章:伺服电机工作原理







评论