基于双模糊控制器的水箱液位控制

3 仿真结果及分析
利用Matlab的Simulink进行仿真,建立该系统的双模糊控制器仿真结构图如图3所示,仿真示意图如图4所示。本文引用地址:https://www.eepw.com.cn/article/162120.htm
仿真结果如图5所示。
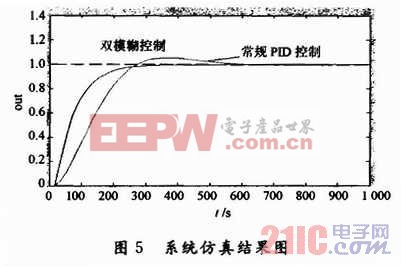
从结果对照图来看系统响应时间的对比,即:双模糊控制响应时间短,只需不到300 s即可使系统到达稳态,常规PID控制响应时间长,大约需要600 s。常规PID控制存在明显的超调,双模糊控制则没有超调,双模糊控制器在稳态时消除了系统稳态误差。
4 结语
本文设计实现了一种双模糊控制器,利用双模糊控制器完成了对系统的仿真。仿真结果显示,双模糊控制器的上升时间短,响应速度快,稳态精度高。从实验来看,双模糊控制器可以改善系统的控制精度和稳定性能。若将该理论应用于实际工程,无疑具有很好的应用价值。












评论