MEMS加速度传感器的自动校准平台

3.2 支脚的设计
当前广泛使用的支脚类型包括液压式和机械式两种。液压型的支脚虽然输出功率较大,但是也存在明显的缺点:液压油本身可压缩,液压油粘滞系数随温度变化,液体容易泄漏,液压油可燃,设备不能自锁,检修困难等。机械支脚虽然惯性较大,但适应性强并可以实现机械锁紧。考虑到现场环境可能比较恶劣,本文采用了机械式调平方法,系统结构示意图如图4所示。本文引用地址:https://www.eepw.com.cn/article/161924.htm
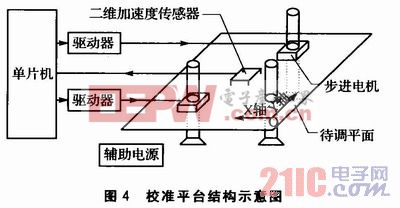
将电机轴设计为中空的螺母式结构,支脚就是旋人其中的螺杆。平台的支撑架由两部分组成:电机和台面构成的整体、旋在电机轴内的螺杆。螺母及其相连的内筒固定不动而螺杆旋转,带动电机以及上面的平台一起作直线运动。这种螺旋传动的方式将旋转运动转化为直线运动,从而实现平台的升降,并且能在任何高度自锁。
如图4所示,单片机收到加速度传感器送来的倾角信息后,在实时显示的同时按照预先设定的控制算法,控制步进电机的转动。电机轴的正反转动转化为支撑轴的上升和下降,从而实现对倾斜平面的调平。
3.3 系统软件设计
自动校准平台的程序流程如图5所示,其中最主要的部分是角度信号的采集、数据的进一步处理以及电机的自动控制。信号采集环节主要是完成传感器与单片机之间的I2C串口通信;数据处理环节包括正负角度值修正、传感器输出的线性化处理以及软件滤波;电机控制环节包括快慢档调节、零点锁定和PID控制。
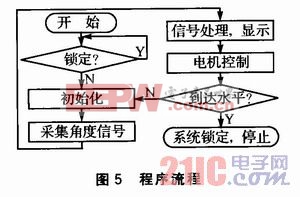
其中,电机控制与平台调平直接相关。系统根据检测到的倾角大小,在不同的倾角范围采取不同的调平速度和调平精度。倾角较大时调平精度较粗,电机一次转动的步数较多,支撑轴的伸出速度越快,调平速度就越快;倾角小于低速阈值时,电机转动频率降低,支撑轴的伸出速度变慢,使平台形变和支腿伸出速度过快所带来的不良影响得以减小,从而在整体上兼顾了调平速度和调平精度。
从实际应用出发,考虑到当基座调平完成后,平台上的设备便开始工作,如果该设备在运行过程中产生振动,则必然导致基座不稳定。若不加任何防范措施,其结果就是平台上设备工作的同时基座继续调平,这对于设备的正常运行是非常不利的。特别当其应用于吊车、火炮等有较高稳定性要求的调平场合时,上述情况是非常危险的。因此,在原先的基础上增设了调平完成后的自锁定功能,以及手动解锁按钮。
整个调平过程是一个离散化的动态趋近过程。在系统跟踪倾角状态的每个周期,平台都逐步逼近水平位置,直至与水平面的差别小于停机阈值。此时电机停转,平台锁定,系统默认一次校准任务完成。在下一次基座调平任务来临之前,需要手动操作解锁按钮,以唤醒系统工作。从系统动态调平的思想中可以看出,两台电机的摆放位置并不是固定的,只要3个支撑点不共线,平台就可以实现自动调平。
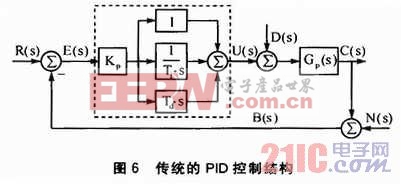
为使系统更加稳定、准确的完成调平工作,采用了基于PID的反馈控制算法。传统的PID控制结构如图6所示,虚线框内是PID控制器,R(s)为输入量,C(s)表示复杂系统输出,B(s)是反馈量,控制偏差信号E(s)=R(s)-B(s),G。(s)表示被控过程,D(s)为外界干扰,N(s)是传感器噪声。

pid控制器相关文章:pid控制器原理
倾角传感器相关文章:倾角传感器原理











评论