MEMS加速度传感器的自动校准平台

2 平台调平原理
目前工程上4支点或更多支点的调平系统应用广泛,这主要是从稳定性角度考虑的,但超过3根支脚后必然要面临超定位的问题。由于虚腿的出现,平台上的设备工作时不能保证每根支脚上的受力具有重复性,从而导致支架形变,影响调平精度。而在3点调平结构中,各支脚受力均匀,只要支脚设计得当就可以保证较高的稳定性,调平控制模型如图2所示。本文引用地址:https://www.eepw.com.cn/article/161924.htm
。
3 系统硬件设计
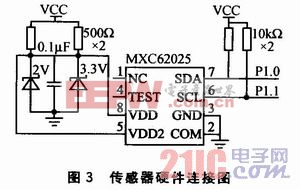
3.1 传感器硬件连接
加速度传感器以I2C总线标准输出数据,由于本身即为数字量,因而节省了模/数转换所需的硬件,但I2C接口为开漏输出结构,必须接上拉电阻后才能输出高电平。其硬件连接如图3所示,8脚上的电源电压需稳定在2.7~3.6 V,5脚上的I2C辅助电压标称值为1.8 V,但只要低于8脚上的电压值亦可正常工作,电源与地之间通过一个0.1μF电容滤波。由于采用的单片机STC10F08没有I2C接口,故将其通用I/0接口P1.0和P1.1模拟成I2C接口的SDA和SCL。

pid控制器相关文章:pid控制器原理
倾角传感器相关文章:倾角传感器原理











评论