数字化舞台布光灯具控制器的设计

由于不需要像Mamdani型那样计算面积重心,Sugeno型的解模糊算法相对简单,运算量较小。
Mamdani型和Sugeno型有各自的优势,Mamdani型的优点为:
· 直观、符合人的习惯
· 广泛被接受
Sugeno型的优点为:
· 很高的运算效率
· 可以协同线性控制理论(如PID)
· 可以使用优化和自适应技术
· 可以保证输出平面的连续性
· 可以进行数学分析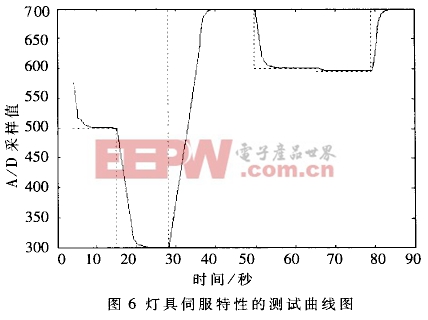
对于本项目,通过在PC机中进行的仿真和实际测试表明,二者的输出平面和控制效果相近。而Sugeno型运算量少,更适合在单片机中使用。
模糊控制器的输出为PWM值,采用0阶Sugeno模型推理,有五个输出值:{反向高速,反向中速,停,正向中速,正向高速},由NRun、NWalk、Prone、PWalk、PRun表示,模糊逻辑推理规则见表1。
表1 模糊逻辑揄规则
| PB,5 | PS,4 | Z,3 | NS,2 | NB,1 | |
| P,3 | NRun | NRun | Prone | Prone | PRun |
| Z,2 | NRun | NWalk | Prone | PWalk | PRun |
| N,1 | NRun | Prone | Prone | PRun | PRun |
对于不同的灯具和自由度,NWalk和PWalk的数值是可调参数,从EEPROM中读取,因此不能使用查表方式编程,而要进行实时运算。为提高速度,在程序中所有的四则运算都是字节型和整型,避免使用浮点量,标准8051内核可以用一个指令完成,最长为4个机器周期。模糊隶属度值用0~255表示,而不是0~1,在运算最后一步再作归一化处理。
由于在模糊控制器中缺乏积分环节,使得其无法对较小的残差作出合理的反应。例如由于电机、机构的静摩擦力的存在,当残差较小时,电机无法启动。因此在控制器的输出端叠加一个非线性的积分环节,只在残差e较小、速度v为0的时候起作用,可以再处理这种情况。
图6是灯具伺服特性的实测曲线(俯仰自由度曲线)虚线表示设定值,实线是实际位置测量值。

伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理








评论