基于激光测距技术的车辆宽高检测系统的设计

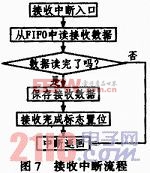
数据采集使用串口通讯模式,发送数据采用查询方式完成,接收数据采用中断方式完成,接收中断流程如图7所示。传感器和主控制器之间通过事先约定的通讯协议进行数据收发,主控制器只需设置好相应的串口号、波特率及相应端口设量,发送测量命令,等待接收。单次读数据命令为:RNLMDscandatata;连续读数据命令为:EN LMDscandata1;连续停数据命令为:EN LMDscandata0。本文引用地址:https://www.eepw.com.cn/article/161163.htm
5 模拟实验
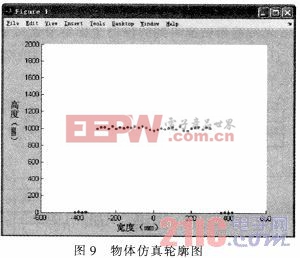
系统整体设计完成后,在进入超限点进行现场调试之前,在实验室进行了模拟实验。将激光传感器固定在3 m高的支架上,让一放置立方体被测物的小推车以10km/h的速度从激光传感器下经过,如图8所示。将激光传感器设置在扫描角度为0°~180°,角度分辨率为0.5°的模式下,当小推车完全经过时,液晶屏上即可显示立方体被测物的最大宽度和高度,同时可通过MATLAB仿真物体的轮廓,如图9所示。同
等条件下,让小推车在传感器下先后通过数次后统计结果,将测量值和实际值比较可得误差在0.15m以内的达到95%,符合测量精度要求。
6 结束语
针对高速公路车辆超限超载这一问题,设计了基于激光测距技术的宽高检测系统,可实现对行进车辆进行实时动态测量。本系统在实验期间,工作可靠稳定,功耗低,计算速度快,测量精度高,抗干扰能力强,实验误差符合高速公路管理部门对于行进车辆宽高超限检测的要求。通过反复实验验证,该设计有效可行,为下一阶段进入现场进行实地调试作了充分准备。





评论