一种多传感器可信度的确定方法

该矩阵是对称阵,即
(1)将判断矩阵Dj的各列作归一化处理,得到矩阵
(2)将列归一化的判断矩阵*****按行相加,得到过渡可信度向量
(3)将过渡可信度向量
对每一组重复此过程,分别建立各目标的判断矩阵(q个),相应得到q个可信度向量Wj(j=1,2,…,q)。传感器r(r=1,2,…,p)的综合可信度为其对各个目标量测可信度的平均值
3 仿真实例及误差分析
为验证该传感器可信度的有效性,运用java语言模拟5个传感器对地面上卡车的运动情况的探测,利用文中算法融合数据与等可信度(每个传感器赋予相同可信度)的融合结果进行比较,如图1。本文引用地址:https://www.eepw.com.cn/article/161157.htm
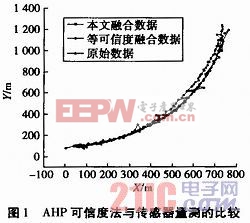
由图1看出,本文AHP可信度确定法的融合结果更为接近目标真实数据,优于等可信度法的融合结果。
分别计算AHP可信度确定法的融合结果与真实数据间的均方误差和平均距离,并与等可信度方法融合结果进行比较如表1:

由表1可以看出,本文融合数据与真实数据间的均方误差和平均距离比等可信度融合结果小,验证了改可信度确定方法的有效性。
4 结论
本文借鉴层次分析法的思想,通过信息的相对可信度建立了传感器可信度矩阵,进而对所有传感器按可信度进行排序,根据传感器的可信度决定参与融合量测客观性,通过对地面卡车的融合结果进行分析,验证了该方法的有效性。












评论