基于MSP430的自动避让小车的设计与实现

弯道矫正原理图如图6所示,通过转弯标志线进行自我定位,在转弯过程中进行方向矫正。本文引用地址:https://www.eepw.com.cn/article/160740.htm
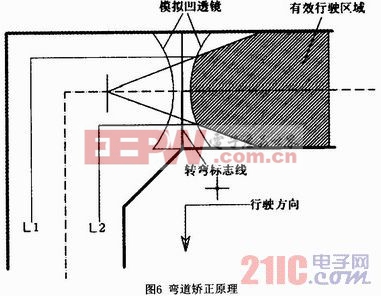
通过软件实现模拟凹透镜散射原理,将不平行于行驶轴线方向的小车进行矫正,图中在有效行驶区域内部的小车都能矫正到直线L1与直线L2之间,理论上与轴线平行。经过实验得出,该方案对偏转角度在正负30°以内的小车矫正效果较为明显。在直线行驶区域内,通过边界线的反馈保证小车不超出边界且在有效行驶区域内进入弯道。
5 测试方法及测试结果
5.1 测试仪器
秒表、卷尺
5.2 测试环境和方法
实验室、单个任务多次测量

5.3 测试结果分析
经过现场测试,甲乙两车速度特性基本一致,交替领跑有速度加快的趋势,系统在交替领跑过程中趋于稳定,并未放大误差。
6 结论
本系统从方案制定,到系统硬件搭建以及算法的采用上都进行了精心设计和论证。测试结果表明自动避让小车控制系统反映速度快、运行稳定,避让及时。















评论