基于MSP430的自动避让小车的设计与实现

3.2 电机驱动模块电路
L298的12个H桥下侧桥晶体管的发射极连在一起,之后通过控制IN1、IN2,当IN1高电平,IN2低电平,使能端ENA输入PWM波时电机正转,反之电机反转,通过改变PWM占空比改变转速。L298构成的电机驱动电路如图2所示。本文引用地址:https://www.eepw.com.cn/article/160740.htm
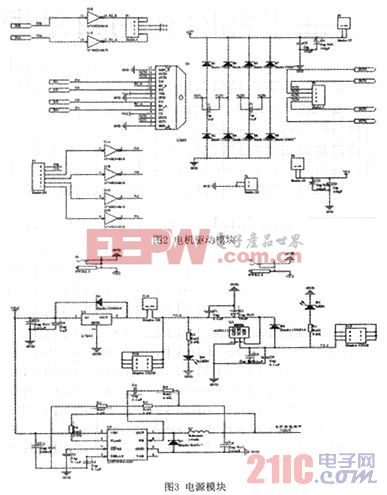
3.3 电源模块
整个系统由一个左右的6800mAh/12.8V的锂电池供电,主要分为两个分支往下一级模块供电,一路是经过L7805稳压到5V给电机驱动模块L298N的输入级供电。再经过lm1117稳压为3.3V给MSP430最小系统、红外循迹、nRF无线模块供电。另外一路则通过由LM2598组成电压可调DC-DC模块给L298N的输出级供电来驱动电机,如图3所示。
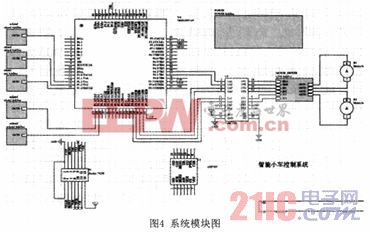
3.4 系统控制示意图
4 软件设计
传感器安装如图5所示,安放在小车头部,该尺寸设计是经过大量的实验与计算总结得出的。内侧的两个传感器与中间的间距9cm,正好小于超车道区域的虚线,便于识别超车区外侧的两个传感器与内侧的间距5cm,该距离便于边界线的检测。
















评论