基于PMC6496运动控制器的机械手上下料系统

图6(续3) 程序23-37节图6(续4) 程序38-49节
图6(续4) 程序50-65节
程序中所使用的几个关键运动指令功能块为PMC6496运动库的一部分,解释如下:
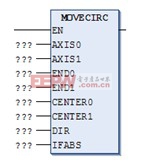
图7 圆弧插补功能块
本文引用地址:https://www.eepw.com.cn/article/160708.htm
2. MOVECIRC
描述:指定的两轴以当前位置为圆弧起点,按已指定的终点位置、圆心位置、插补方向,执行圆弧插补运动。其功能块如图7所示。
参数:
EN:BOOL类型,使能端(Enable),指令块的驱动输入端。
AXIS0:指定参与圆弧插补的第一轴。
AXIS1:指定参与圆弧插补的第二轴。
END0:指定第一轴的圆弧终点坐标。
END1:指定第二轴的圆弧终点坐标。
CENTER0:指定第一轴的圆弧圆心坐标。
CENTER1:指定第二轴的圆弧圆心坐标。
DIR:USINT(BYTE)类型,指定圆弧插补的方向。
IFABS:指定运动模式,0-相对运动,1-绝对运动。
2. PMOVE
描述:指定轴按已设定的脉冲长度及方向、起始速度、最大运行速度、加速度、减速度以及运动模式执行点位运动。其功能块如图8所示。
图8 点位运动功能块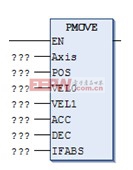
参数:
EN:使能端(Enable),指令块的驱动输入端。
Axis:指定轴号,范围为0~3轴。
POS:指定点位运动的目标位置,即脉冲数,正、负号分别表示正方向和负方向。比如,-10000表示负方向运动10000个脉冲的长度。
VEL0:指定起始速度(即初速度),单位:脉冲/秒。
VEL1:指定运行速度(即最大速度),单位:脉冲/秒。
ACC:指定加速度,单位:脉冲/秒2。
DEC:指定减速度,单位:脉冲/秒2。
IFABS:指定运动模式,0-相对运动,1-绝对运动。
3.HOMEMOVE
描述:指定轴按已设定的模式、方向、速度执行回原点动作。回原点完成后,当前坐标被清0,即视为原点(或称零点)。其功能块如图9所示。
图9 回原点运动功能块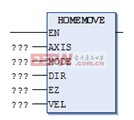
参数:
EN:使能端(Enable),指令块的驱动输入端。
Axis:指定轴号,范围为0~3轴。
DIR:指定回原点方向,1-正向,0-负向。
MODE:指定回原点模式。
EZ:只对模式4起作用,即反找原点时,EZ信号的个数。
VEL:指定回原点速度,单位:脉冲/秒。
4.LINE2
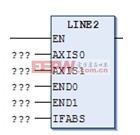
图10 轴直线插补功能块
描述:指定的两轴按已指定的终点位置,及运动模式执行直线插补运动。其功能块如图10所示。
参数:
EN:使能端(Enable),指令块的驱动输入端。
Axis0:指定参与插补的第一轴,指定范围为0~3轴。
Axis1:指定参与插补的第二轴,指定范围为0~3轴。
END0:指定第一轴的目标位置,单位:脉冲数。
END1:指定第二轴的目标位置,单位:脉冲数
VEL1:指定运行速度(即最大速度),单位:脉冲/秒。
IFABS:指定运动模式,0-相对运动,1-绝对运动。
五 总结
综上所述,PMC6496运动控制器具有运动控制功能多、处理I/O信号能力强、性价比高等优点;而且采用梯形图编程十分简单、方便,很容易上手;使用PMC6496可以轻而易举地完成各种自动化设备的复杂运动控制。
作者简介
赵向前 男,工程师 2009年哈尔滨工业大学机电学院毕业,从事自动化技术研发工作。
左 力 男,博士,高级工程师,1998年华中理工大学机械学院毕业,从事自动化技术研发工作。

伺服电机相关文章:伺服电机工作原理










评论