基于自抗扰控制器的异步电机变频调速系统

4.4 实验结果对比研究
变频器设定为矢量控制方式。初始速度给定为200 r·min-1,在40 s后,速度给定为周期60 s,n从200~500 r·min-1变化的三角波得到系统的闭环响应。由图6可知,ADRC控制方式下的跟随性能明显优于常规PID控制。
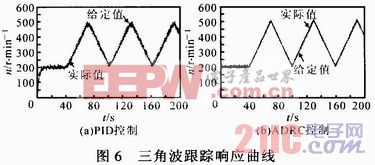
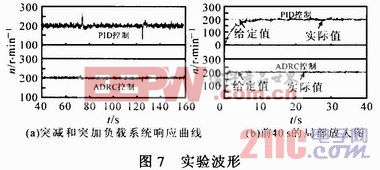
图7a示出两种控制下系统响应曲线。由图可知,ADRC控制下系统的鲁棒性和抗干扰性优于PID控制。图7b示出图6前40 s的局部放大图。
由图可知,ADRC控制方式下的动静态性能明显优于常规PID控制。
5 结论
针对PLC变频调速系统的控制性能需进一步提高的问题,简要介绍了变频调速系统的数学模型,设计了一种基于自抗扰控制器的异步电机变频调速系统。与传统线性PID控制方法相比,采用自抗扰控制器的变频调速系统运行性能得到了显著提升。在保证较快的动态响应的前提下,对ADRC进行了优化,减少了控制器参数,减小了算法计算量,增强了控制器的工程实用性。
矢量控制相关文章:矢量控制原理










评论