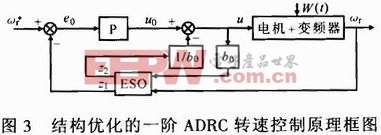
基于自抗扰控制器的异步电机变频调速系统

式中:![]() 为电机速度给定值;
为电机速度给定值;![]() 为电机速度反馈ωr的跟踪信号;
为电机速度反馈ωr的跟踪信号;![]() 为总和扰动W(t)的观测值;u为控制量;β01,β02为ADRC输出误差校正增益;h为采样周期;kp为比例系数;b0为补偿因子,通过整定kp,b0来调整系统的控制性能。
为总和扰动W(t)的观测值;u为控制量;β01,β02为ADRC输出误差校正增益;h为采样周期;kp为比例系数;b0为补偿因子,通过整定kp,b0来调整系统的控制性能。
4 实验及结果分析
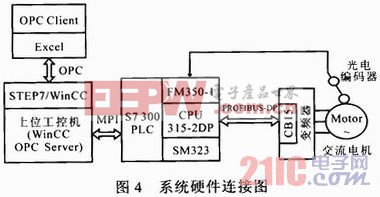
4.1 系统硬件连接
整个系统包括上位机和监控软件(WinCC)、S7-300PLC,Micro Master Vector(MMV)变频器、异步电机和光电编码器,如图4所示。
4.2 系统软件设计
4.2.1 系统通讯设计
系统通讯由三部分组成:①PLC与变频器之间的PROFIBUS-DP现场总线通讯,实现PLC对变频器的现场远程控制;②工控机与PLC之间的MPI通讯,一方面实现了STEP7和PLC之间的通讯,完成程序上载、下载、调试、故障诊断和在线监视等;另一方面实现了WinCC与PLC之间的通讯,完成过程数据的传输,系统状态的实时监控;③WinCC与Excel之间的OPC通讯,通过软件实现对电机转速过程数据的归档并启用OPC通讯服务,将过程数据导出到Excel中,用于系统响应曲线的拟合和各项动静态性能指标的分析。
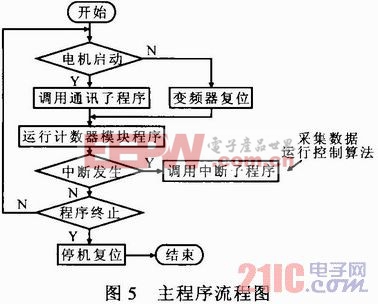
4.2.2 系统控制软件设计
实验中使用语句表STL在工业软件STEP7V5.2中编程。整个系统采用结构化编程,系统程序结构如图5所示。
4.3 ADRC的参数整定
研究表明,β01和β02主要由控制器的离散控制周期决定,一般为:β01=1/h,β02=1/(5h2)。试验中速度的采样周期取为h=100 ms,故取β01=10,β02=20。对于需整定的控制器参数kp,b0,实验中采用由小到大试凑法进行整定,通过现场调试和修改参数,在得到较好的动静态效果时确定一组比较理想的控制器参数,参数整定相对容易。
矢量控制相关文章:矢量控制原理










评论