三电平逆变器SVPWM控制策略及实验验证

Mark2=
 (4)
(4) Mark3=![]() (5)
(5)
1)当调制比mMark1,即旋转矢量V*处于扇区D1时,V*是由V0、V1和V2三个电压矢量合成的,如图3所示。根据矢量合成原理,可以列出如下方程
 (6)
(6)
解式(6)得
 (7)
(7)
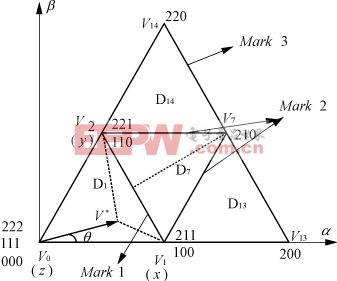
图3 旋转矢量在D1扇区的矢量图
2)当调制比Mark1mMark2,即旋转矢量V*处于扇区D7时,V*是由V1、V2和V7三个电压矢量合成的,可列出如下方程 (8)
解式(8)得
 (9)
(9)
3)当调制比Mark2mMark3,且0θ30°,即旋转矢量V*处于扇区D13时,V*是由V1、V13和V7三个电压矢量合成的,可列出如下方程
 (10)
(10)
解式(10)得
 (11)
(11)
4)当调制比Mmark2mMark3,且30°θ60°,即旋转矢量V*处于扇区D14时,V*是由V2、V7和V14三个电压矢量合成的,可列出如下方程
 (12)
(12)
解式(12)得
 (13)
(13)
这样,在计算其它五个区间的Tx,Ty,Tz时,只要将式(7)、(9)、(11)和(13)中的θ值分别用θ-60°,θ-120°,θ-180°,θ-240°,θ-300°来替代即可实现对整个矢量空间的计算。
4 最小开关损耗调制算法
在三电平逆变器中,由于冗余开关状态的存在,使得一个电压矢量对应于两个或三个开关状态,因此必须使用一定的算法来减少开关动作次数,从而减少开关损耗。减少开关损耗算法的基本原则是每次开关状态的变化只引起一相电压的变化并且只有两个互补开关管的触发信号发生变化,从而减少了开关损耗并降低了开关频率。例如,在图2中,空间矢量从D14扇区旋转到D15扇区,A、B、C三相开关管的状态就可以按照(221→220→210→110→110→210→220→221)→(221→220→120→110→110→120→220→221)的顺序来变化。当空间矢量V*旋转到D14扇区时,这时的空间矢量是由V2(用开关状态221或110表示)、V7(用开关状态210表示)和V14(用开关状态220表示)三个矢量共同合成的,第一个括号内开关状态的调制顺序就是空间矢量在D14扇区的调制顺序。当空间矢量V*旋转到D15扇区时,这时的空间矢量是由V2(用开关状态221或110表示)、V14(用开关状态220表示)和V8(用开关状态120表示)三个矢量共同合成的,第二个括号内开关状态的调制顺序就是空间矢量在D15扇区的调制顺序。其中,开关状态221和110代表同一个矢量V2,以它作为开关状态的起始状态和末尾状态进行过渡。因此,无论是在扇区的内部还是在两个扇区之间,开关状态的每一次变化都只有桥臂互补驱动信号的两个管子开关状态发生了变化,从而减少了开关损耗。
5 实验研究
本实验主电路拓扑如图1所示,二极管钳位型三电平逆变器的主开关器件选用2SK1941,其最大承受电压可达600V,最大通态电流16A。钳位二极管选择IXY SDESI30,它所能承受的最大通态电流为12A。逆变PWM开关频率为5kHz,输出正弦波基波频率为278Hz。本数字控制系统是基于TMS320F240 DSP芯片,12路驱动信号分别由TMS320F240经控制电路产生,全比较单元的六路PWM输出分别驱动ABC三相的S1和S3管,单比较单元的三路PWM信号及其反相信号经死区电路后分别驱动逆变器的S2和S4管。本控制是通过dq变换,把正弦交流检测量转变为dq直流反馈量,再分别进行PI调节,然后通过SVPWM模块对三电平逆变器进行控制。图4为三相三电平逆变器的控制系统结构图。
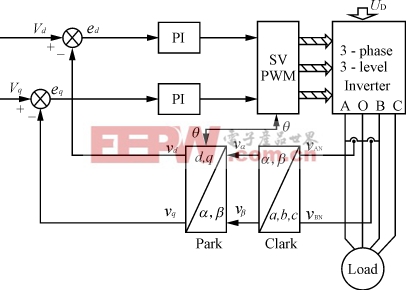
图4 三电平控制系统结构图
图5(a)和图5(b)分别是二极管钳位型三电平逆变器输出相电压VAN、VBN、VCN和输出线电压VBC、VAC的实验波形,我们能够很明显地看出三电平的形状,三电平要比两电平更逼近正弦,因此可以在开关频率不是很高并且不增加开关管的耐压值的情况下,获得较低的谐波畸变率。
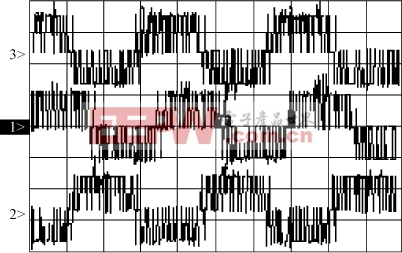
(a) 相电压VAN、VBN、VCN波形

(b) 线电压VBC、VAC波形

逆变器相关文章:逆变器原理
pwm相关文章:pwm是什么
逆变器相关文章:逆变器工作原理
脉宽调制相关文章:脉宽调制原理




评论