基于COMX的机器人伺服控制器设计

3 软件设计
3.1 软件结构
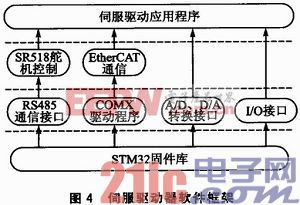
基于COMX的伺服控制器的软件框架如图4所示。伺服系统的主控芯片是STM32,在软件上采用了ST公司开发的底层固件库来操作硬件接口。在本系统中,主要有RS485通信模块、COMX驱动模块、A/D转换模块、D/A转换模块以及I/O模块。系统中通过COMX来实现EtherCAT通信,采用RS485来控制SR518舵机,同时采用这些模块的API来构建伺服驱动的应用程序。
3.2 COMX驱动设计
COMX驱动的执行流程,在硬件电路连接好的前提下,主要任务是寄存器的配置及通信流程的控制。首先,要配置STM32的相关引脚,将与COMX相关的数据线、地址线、片选线和读写信号线全部设置成复用推挽输出模式;然后,设置FSMC的相关寄存器,配置FSMC时钟、时序逻辑、读写模式、数据宽度等;接着,就是COMX启动检测阶段,由于COMX是独立网卡,内部有独立的系统,只有在它内部系统运行就绪后才能正常通信,这就需要检测COMX提供的一些标志寄存器的相关位,以此来判断内部系统的状态;最后,等COMX一切就绪后就可以正常通信,执行读写操作。
COMX是独立的网卡设备,通过加载不同的固件程序,来实现各种实时以太网通信协议,本系统中使用的是EtherCAT从站协议。在COMX使用之前,要保证固件程序下载到Flash中,同时配置文件也要保存在Flash中。
COMX上电启动时,会自动加载运行固件,并读取配置文件。下载固件时要使用赫优讯公司配套的PCI板卡和cifX Test软件工具,配置文件的下载需要用SYCON.net工具,具体步骤可以查看参考文献。当固件程序和配置文件下载完毕后,就可以使用COMX网卡了。
3.3 COMX读写操作实现
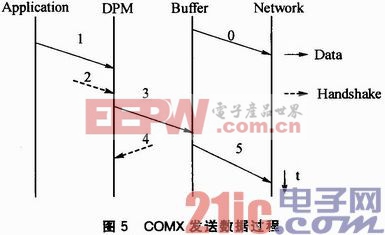
COMX读写模式是基于缓冲的握手方式,在DPM中,主机和netX500系统通过握手标记来划分DPM的数据读写权限,这些握手标记在握手通道中。每个通道都有一对CMD和ACK标记位,当这两个标记位相同时,主机可以写相应的DPM区域;当不同时,主机可以读相应的DPM区域。COMX发送数据的过程如图5所示。
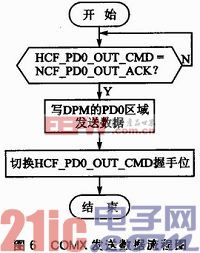
根据以上分析过程,可以设计出COMX发送数据的驱动程序,其执行流程如图6所示。












评论