硒砂瓜温室种植模糊控制系统设计

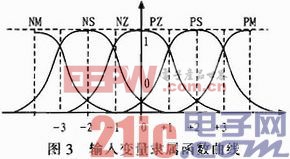
2.2 隶属函数
在实际应用中,隶属函数主要有正态函数、梯形和三角形等几种形式,由于人们对事物的判别往往沿用正态分布的思维方式,因此,如图3所示,本设计采用正态分布函数来表示模糊变量的隶属函数。本文引用地址:https://www.eepw.com.cn/article/159618.htm
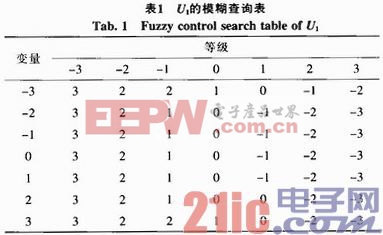
2.3 建立模糊控制规则
模糊控制器的控制规则是基于手动控制策略,是操作者经验和技术知识的集合,通过语言归纳出来的条件语句,利用模糊集合理论和语言变量的概念,把利用语言归纳的手动控制策略上升为数值运算,最后写成矩阵形式就构成了基本模糊查询表(决策库),并由此实现模糊自动控制。表1所示为Ut的模糊查询表,同理可得出U2、U3、U4的模糊查询表。
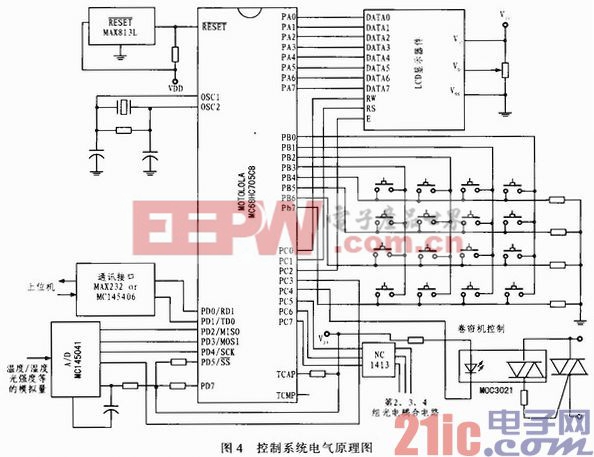
3 电路设计
如图4所示,系统控制的核心选用MOTOROLA公司CMOS工艺8位单片机MC68HC705C8,其主要特点是片内EPROM/OTPROM最多可达7744字节,24条双向I/O线,7条固定输入线,电源电压3.0~5.5 V(2 V数据保持方式),WAIT、STOP低功耗和数据保持方式,可选择存储器设置等。












评论