基于ARM9嵌入式系统智能灭火机器人控制器设计

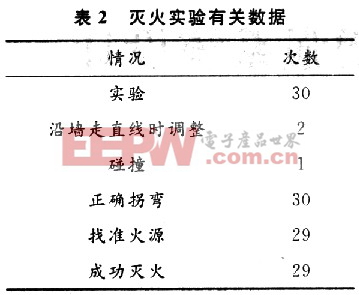
在硬件的设计和实现的基础上,用C语言编写了让器人智能搜索房间,发现火源并灭火回家的程序。在不断对各种参数的调节后,该机器人可以在8 s内完成任意房间灭火,灭完火后。机器人自动回家。统计了30组数据,如表2所示。灭火照片如图8所示。本文引用地址:https://www.eepw.com.cn/article/151731.htm

6 结语
实际测试证明该设计的灭火机器人能够较好完成灭火任务,具有一定参考和使用价值。该设计的创新之处为:以AM09为核心的嵌入式系统的控制器运行速度高,能够高速采集和处理传感器系统信号,并发出相应的控制信号,实现8 s内完成任意房间灭火;该设计采用了嵌入式系统内核,大大提高了机器人处理信号的能力;STR911FAM46和AVR-ATMEGA8-16PC的选用在实现了功能强大的同时,保证了良好的扩展性,并且成本较低,有利于智能机器人早日实现市场化;双电源供电系统的引入,使机器人的运行更加稳定可靠;通过沿墙行进规则的设计,机器人的灵敏度和适应外界变化的特性明显提高,且程序简捷,有利于模块化编程。








评论